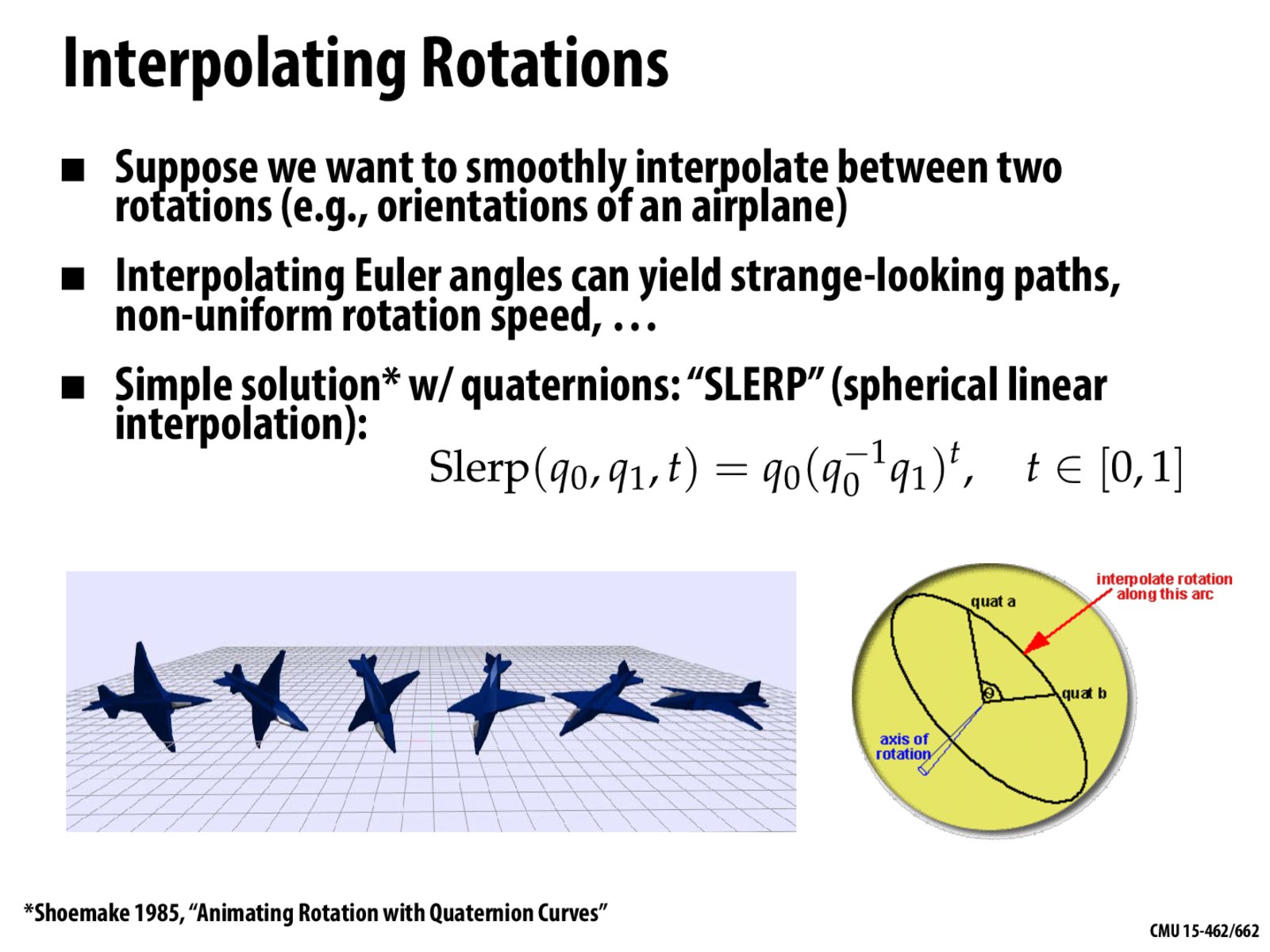
Why would interpolating Euler angles yield strange results? How do quaternions help?
silentQ
These slides (https://www.essentialmath.com/GDC2012/GDC2012_JMV_Rotations.pdf) contain a nice example of interpolating Euler Angles being undesirable: say you want to go from (0, 90, 0) to (90, 45, 90). What you would want the midpoint to be is (90, 22.5, 90), but interpolating directly gives you a midpoint of (45, 22.5, 45), causing the shape to swing "out" to one side rather than following the line you would expect.
This is visualized nicely in this video: https://www.youtube.com/watch?v=QxIdIZ0eKCE
tpan496
Are there other solutions beside SLERP interpolation? Wonder if quadratic ones would perform better for interpolations
Why would interpolating Euler angles yield strange results? How do quaternions help?
These slides (https://www.essentialmath.com/GDC2012/GDC2012_JMV_Rotations.pdf) contain a nice example of interpolating Euler Angles being undesirable: say you want to go from (0, 90, 0) to (90, 45, 90). What you would want the midpoint to be is (90, 22.5, 90), but interpolating directly gives you a midpoint of (45, 22.5, 45), causing the shape to swing "out" to one side rather than following the line you would expect.
This is visualized nicely in this video: https://www.youtube.com/watch?v=QxIdIZ0eKCE
Are there other solutions beside SLERP interpolation? Wonder if quadratic ones would perform better for interpolations