I think we went over the 3d rotation using quaternions a bit fast. Do you have an example of how the quaternion would be used for an example? I am not sure how I would compose a quaternion if I wanted to rotate in certain amounts in the x/y/z direction
anonymous
@cou This seems helpful. The three Euler angles are mapped to the u axis, i.e. i, j, k. https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
hvedati
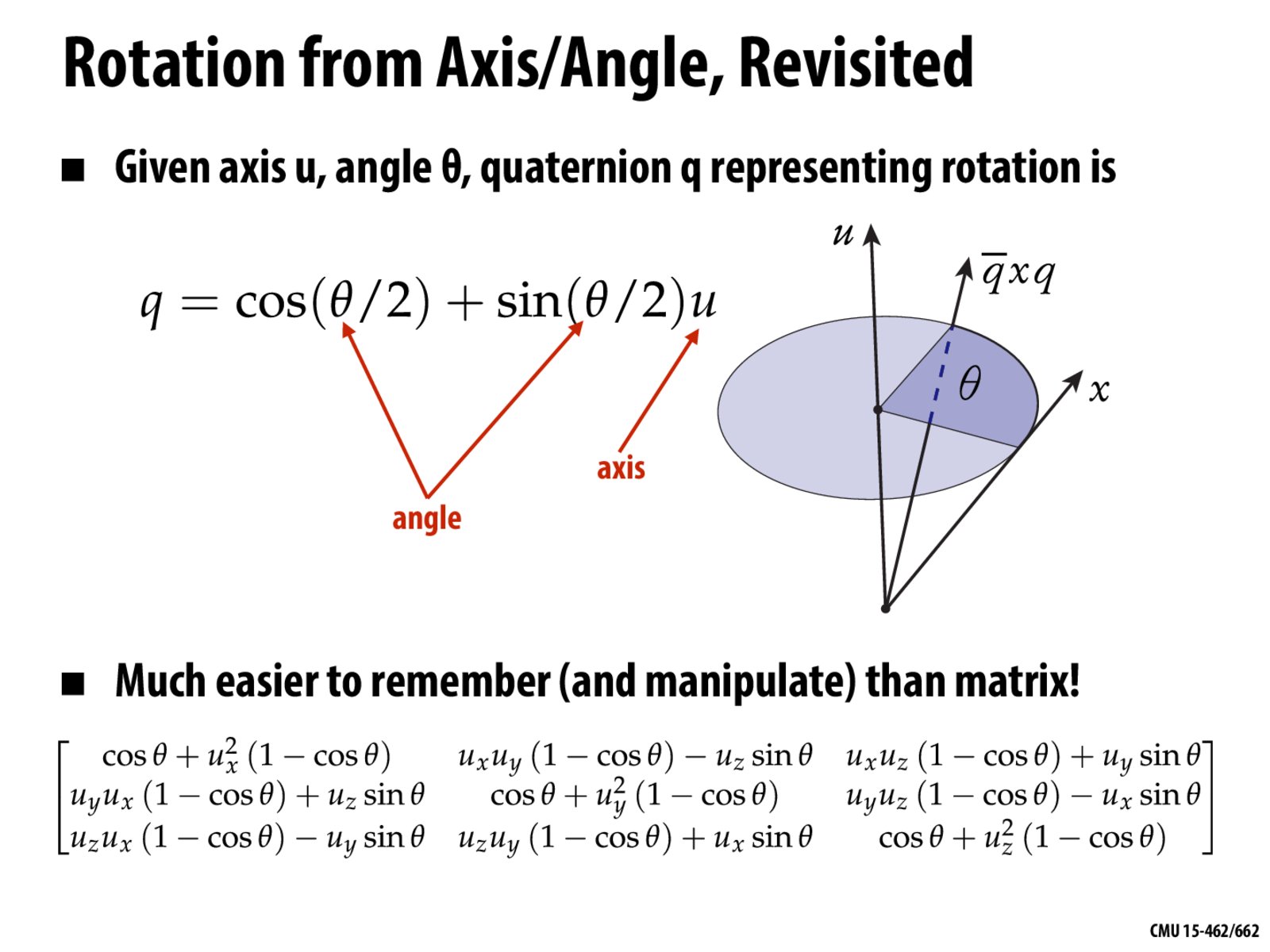
how was this matrix derived?
nrauen
I think this is a product of several other matrices. See slide 11.
Kuragama
Does a quaternion rotation rotate its target in place (as though the axis were placed at or through the object)? Or does it treat the axis vector as passing through the origin and rotate about that? The resulting orientation should be the same, but the position would differ.
EdCat
During the class, I was confused by the q-xq calculation because of considering x as times instead of the vector of the point to rotate. Thus this is just a note to remind if someone has the same problem.
I think we went over the 3d rotation using quaternions a bit fast. Do you have an example of how the quaternion would be used for an example? I am not sure how I would compose a quaternion if I wanted to rotate in certain amounts in the x/y/z direction
@cou This seems helpful. The three Euler angles are mapped to the u axis, i.e. i, j, k. https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
how was this matrix derived?
I think this is a product of several other matrices. See slide 11.
Does a quaternion rotation rotate its target in place (as though the axis were placed at or through the object)? Or does it treat the axis vector as passing through the origin and rotate about that? The resulting orientation should be the same, but the position would differ.
During the class, I was confused by the q-xq calculation because of considering x as
timesinstead of the vector of the point to rotate. Thus this is just a note to remind if someone has the same problem.