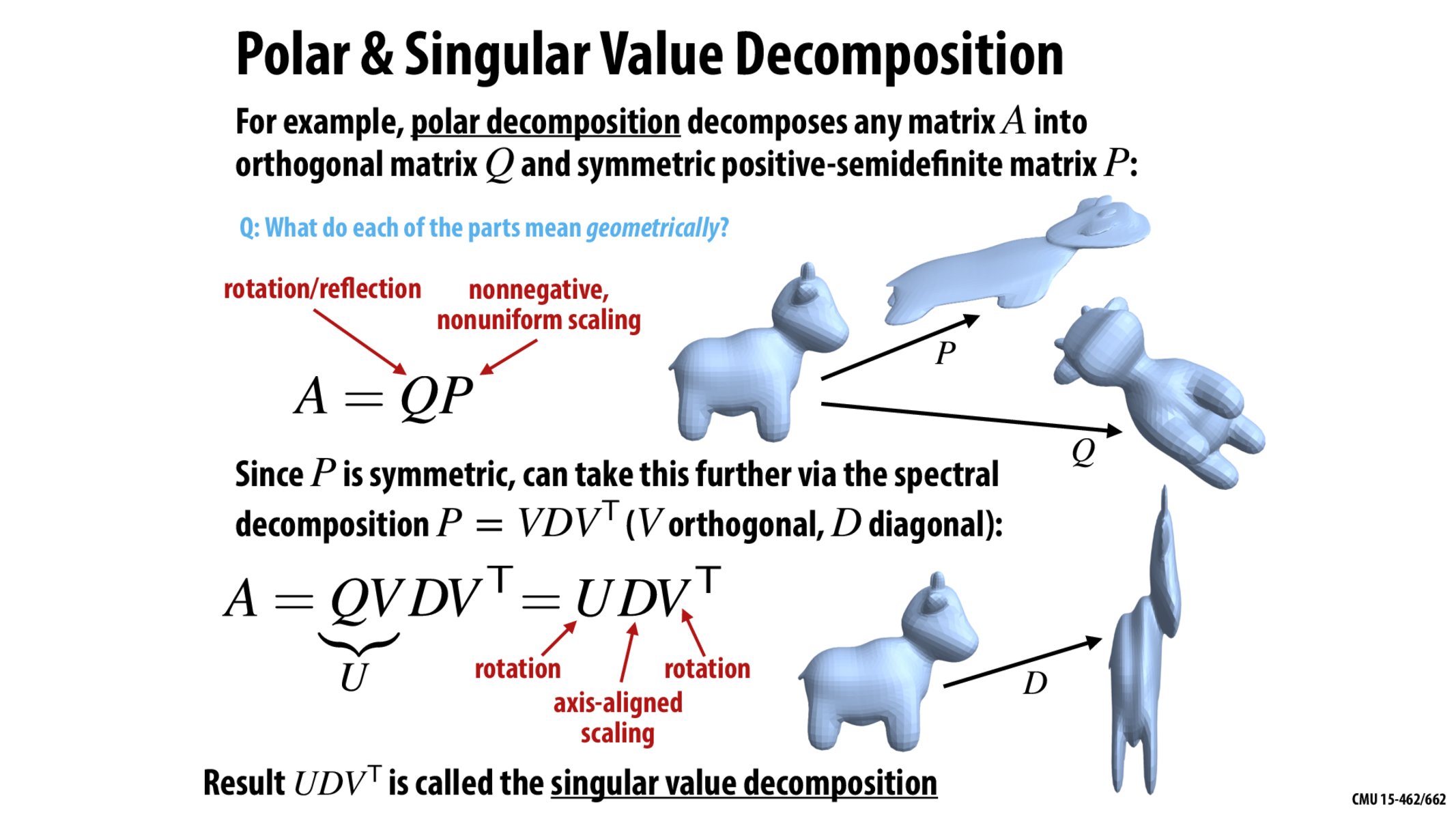
Why the technique called singular value decomposition?
Would it be better to use quaternion to calculate rotation instead of vector3?
Why the technique called singular value decomposition?
Would it be better to use quaternion to calculate rotation instead of vector3?