Are there any instances where the joint angle of each joint is expressed in world frame rather than with respect to the previous joint?
How practical is it to compute gradient descent every time someone is reaching for something for example? Are there quicker estimation algorithms?
Will FK and IK be in conflict with each other/form a cycle for one joint?
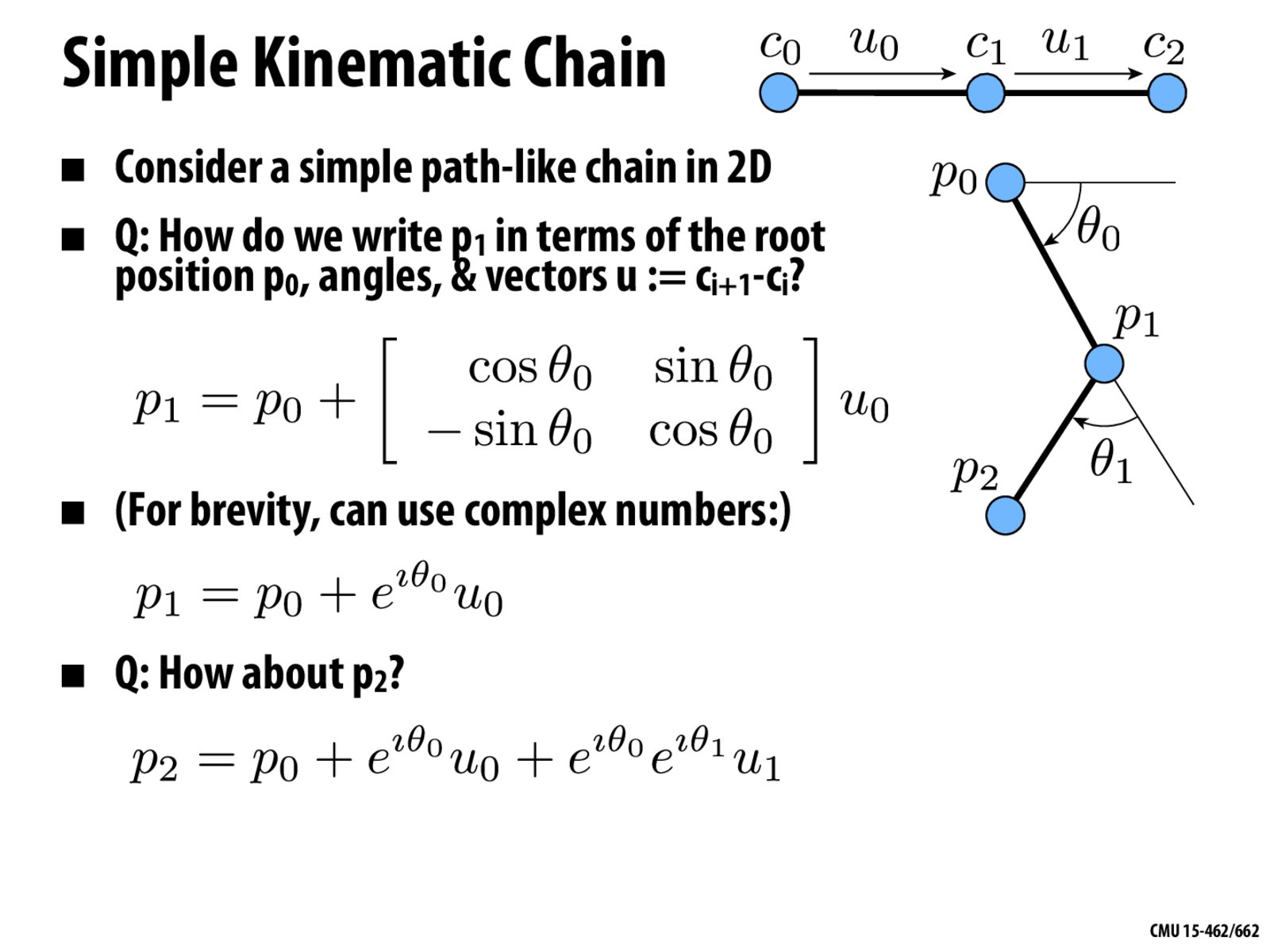
Can we view the calculation of p2 as a sequence of linear transformation, where (u0 + theta1 u1) is rotated as a whole by theta0?
Are there any instances where the joint angle of each joint is expressed in world frame rather than with respect to the previous joint?
How practical is it to compute gradient descent every time someone is reaching for something for example? Are there quicker estimation algorithms?
Will FK and IK be in conflict with each other/form a cycle for one joint?
Can we view the calculation of p2 as a sequence of linear transformation, where (u0 + theta1 u1) is rotated as a whole by theta0?