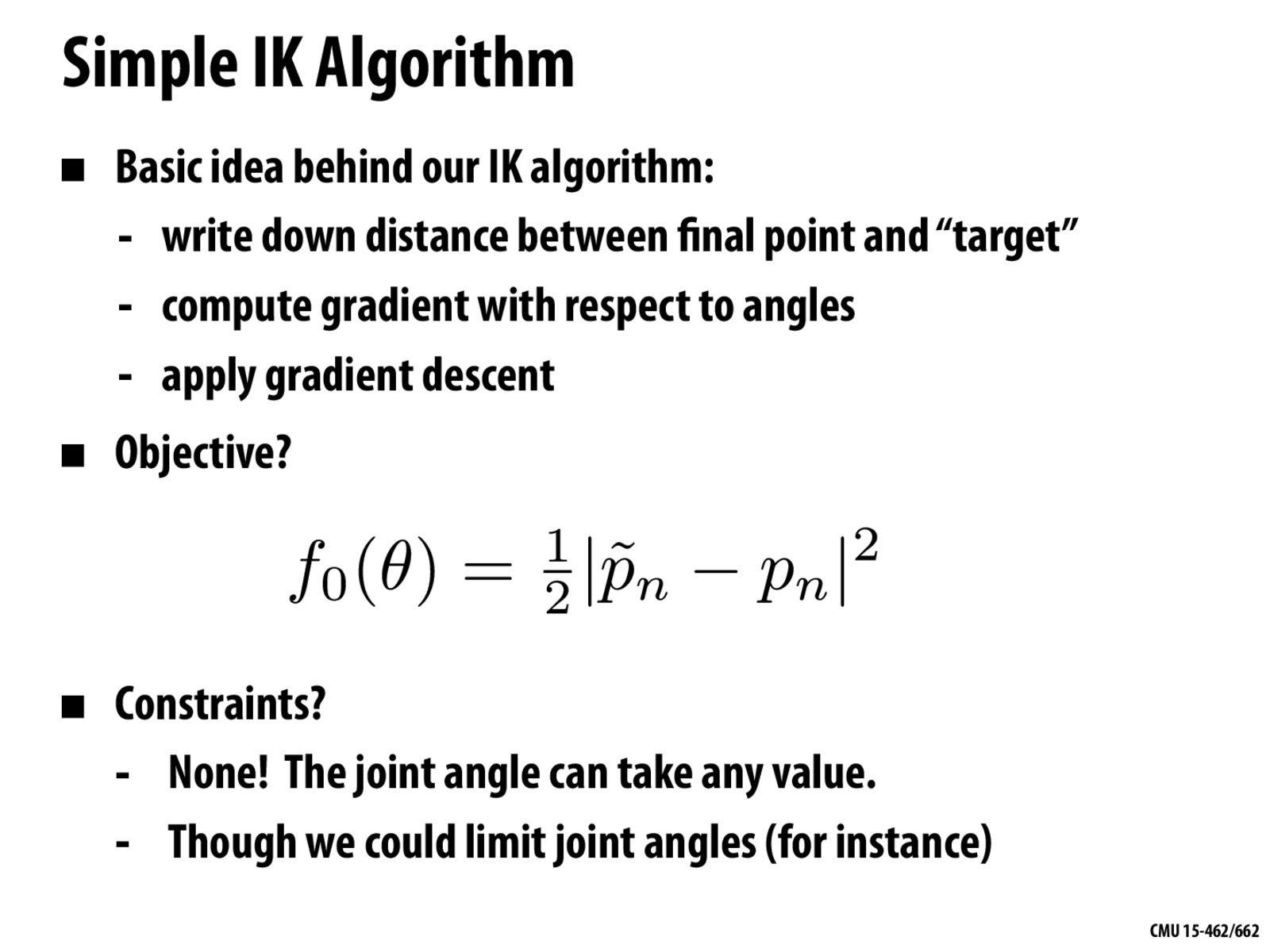
How would we actually limit joint angles? Gradient descent seems to only involve the objective so how would we add constraints for gradient descent?
norgate
When gradient descent does not converge, what will the behavior of IK look like? Is there a way to avoid this?
Alan7996
If we reach joint angle limits during gradient descent, is it possible to boost the efficiency of calculation by fixing an axis as that limit and just considering the remaining axis? Or will all axis still have to be considered together?
wmarango
I'm curious to see how natural/unnatural the motion produced by this type of gradient descent would be. I am imagining that if you took a human rig and did this technique without constraining the angles, the result would be very weird.
viceversa
I am still not sure how the descent gradient is working, why we could not just compute the angle between the target and current joint and then move it?
Dalyons
Why wouldn't we constrain the angles? So much of this part of the course has been physics-based, so I figure we'd want to be as accurate as possible here.
ScreenTime
Conceptually, how would running gradient descent on all other joints fit into IK? It makes sense to me that we would want to have a whole body movement for something to be physically possible but how does this make sure that non-specified joints also move correctly.
jcm
Why don't we make the objective function just the distance between points?
spookyspider
Does this gradient descent effect only the joint, or all joints in the joint to root chain?
derk
How should we interpret and/or handle cases of non-convergence for IK?
embl
If there are intermediate points without constraints between the target and the final points, how do we formulate the problem to 'make sense'? I think this might be a similar question to derk's.
David
In the example of a person, we have many points. Can you provide an example of how they all fit into an objective function?
gfkang
How do we arrive at a final result if there are many different joint angles? And how specifically do we limit joint angles to achieve a good result?
kpshah
How do we choose how to limit joint angles (and how many/which ones)?
How would we actually limit joint angles? Gradient descent seems to only involve the objective so how would we add constraints for gradient descent?
When gradient descent does not converge, what will the behavior of IK look like? Is there a way to avoid this?
If we reach joint angle limits during gradient descent, is it possible to boost the efficiency of calculation by fixing an axis as that limit and just considering the remaining axis? Or will all axis still have to be considered together?
I'm curious to see how natural/unnatural the motion produced by this type of gradient descent would be. I am imagining that if you took a human rig and did this technique without constraining the angles, the result would be very weird.
I am still not sure how the descent gradient is working, why we could not just compute the angle between the target and current joint and then move it?
Why wouldn't we constrain the angles? So much of this part of the course has been physics-based, so I figure we'd want to be as accurate as possible here.
Conceptually, how would running gradient descent on all other joints fit into IK? It makes sense to me that we would want to have a whole body movement for something to be physically possible but how does this make sure that non-specified joints also move correctly.
Why don't we make the objective function just the distance between points?
Does this gradient descent effect only the joint, or all joints in the joint to root chain?
How should we interpret and/or handle cases of non-convergence for IK?
If there are intermediate points without constraints between the target and the final points, how do we formulate the problem to 'make sense'? I think this might be a similar question to derk's.
In the example of a person, we have many points. Can you provide an example of how they all fit into an objective function?
How do we arrive at a final result if there are many different joint angles? And how specifically do we limit joint angles to achieve a good result?
How do we choose how to limit joint angles (and how many/which ones)?
How can we infer the convergence?