What's the ideal approach for a system to model an object where the joints or limbs act differently? Like maybe you'd want to emulate them as different material or different weight of limbs so one would move slower than another. Would this best be implemented via constraints during IK?
richardnnn
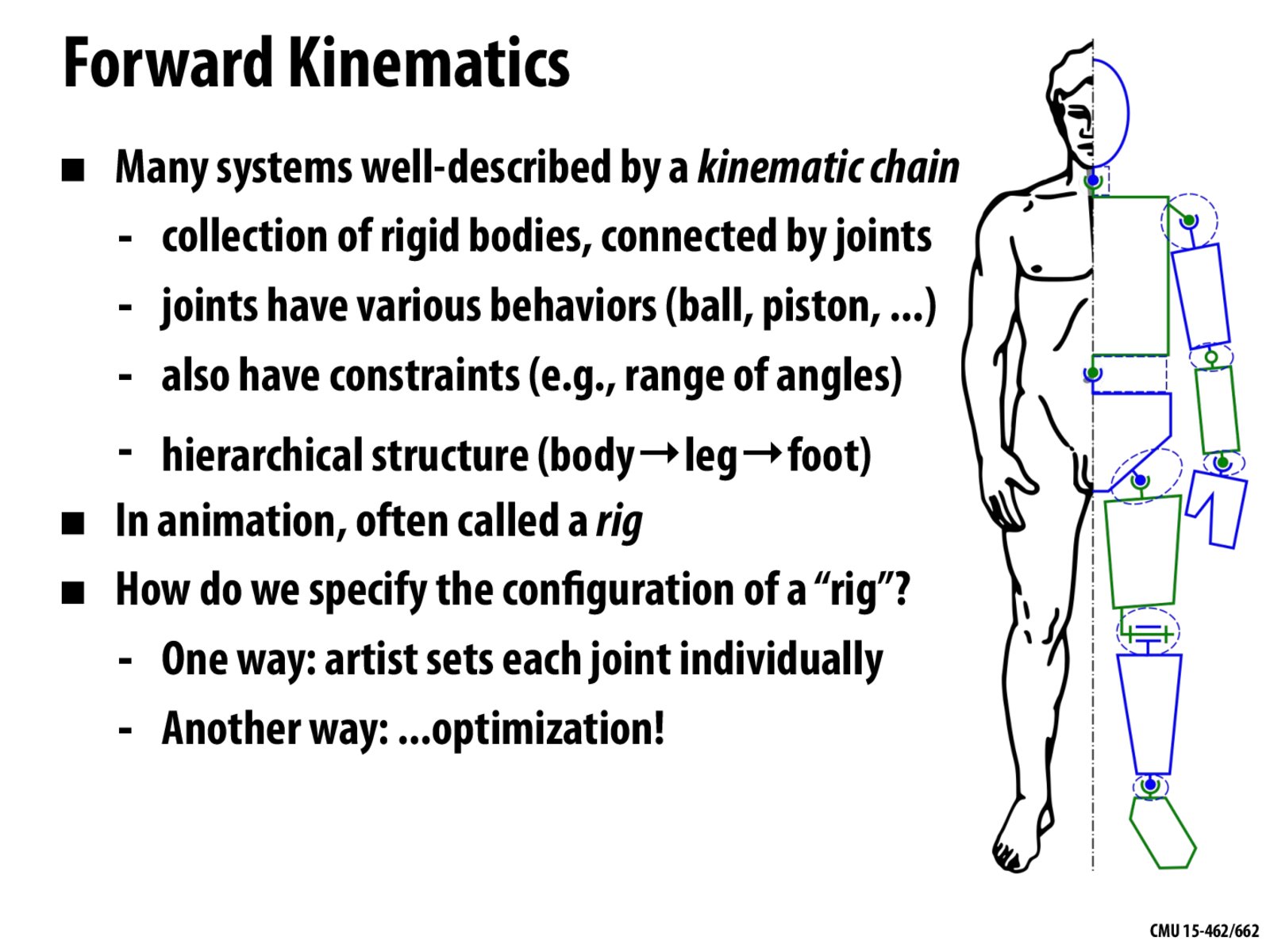
What's the definition of the word "configuration" here?
viceversa
How would this data structure work if, like A3 we need to delete edges, we now need to delete one component?
fzeng
How do you optimize for joints on a rig? Isn't this based on what the artist want the model to do, and should reflect the intended physical limitations of the model?
What's the ideal approach for a system to model an object where the joints or limbs act differently? Like maybe you'd want to emulate them as different material or different weight of limbs so one would move slower than another. Would this best be implemented via constraints during IK?
What's the definition of the word "configuration" here?
How would this data structure work if, like A3 we need to delete edges, we now need to delete one component?
How do you optimize for joints on a rig? Isn't this based on what the artist want the model to do, and should reflect the intended physical limitations of the model?