Besides Gimbal lock and the complexity of calculations with Euler representations, are there other well-known downsides in using Euler angles?
viceversa
I am confusing here, as we fixed the theta y on the previous slide, why do we need to change it now? Or why could we change it if we have assumed its value already?
norgate
Can gimbal lock still happen if you go from euler->quaternions? Say you want to think about rotations in terms of euler angles, but convert them to quaternions when you apply the actual rotations. Is that ok?
YutianW
I'm also confused here. We've already specify theta_y to be pi/2, so it make sense we are now performing rotation on theta_x and theta_z only -- we've already finished rotating theta_y?
daria
Same here. I thought we fixed the angle theta_y on the previous slide
gloose
Chiming in to agree-- I don't doubt that Gimbal lock is a thing that can happen, but I don't think your explanation in the lecture that it's because only theta_x and theta_z show up in the matrix is correct. After all, there's nothing special about pi/2; no matter which angle we rotate to around the y axis, we have just set theta_y to a constant, so naturally the resulting matrix does not contain theta_y.
mangopi
I'm still confusded as to how we are no longer able to rotate on one axis, I'm not sure why we can't rotate about the y-axis anymore, since doesn't the original matrix use a theta_y?
superbluecat
I wonder what you mean by saying it is locked; by applying Rz\Ry\Rx the rotation can exactly be like this, so why is it locked?
twizzler
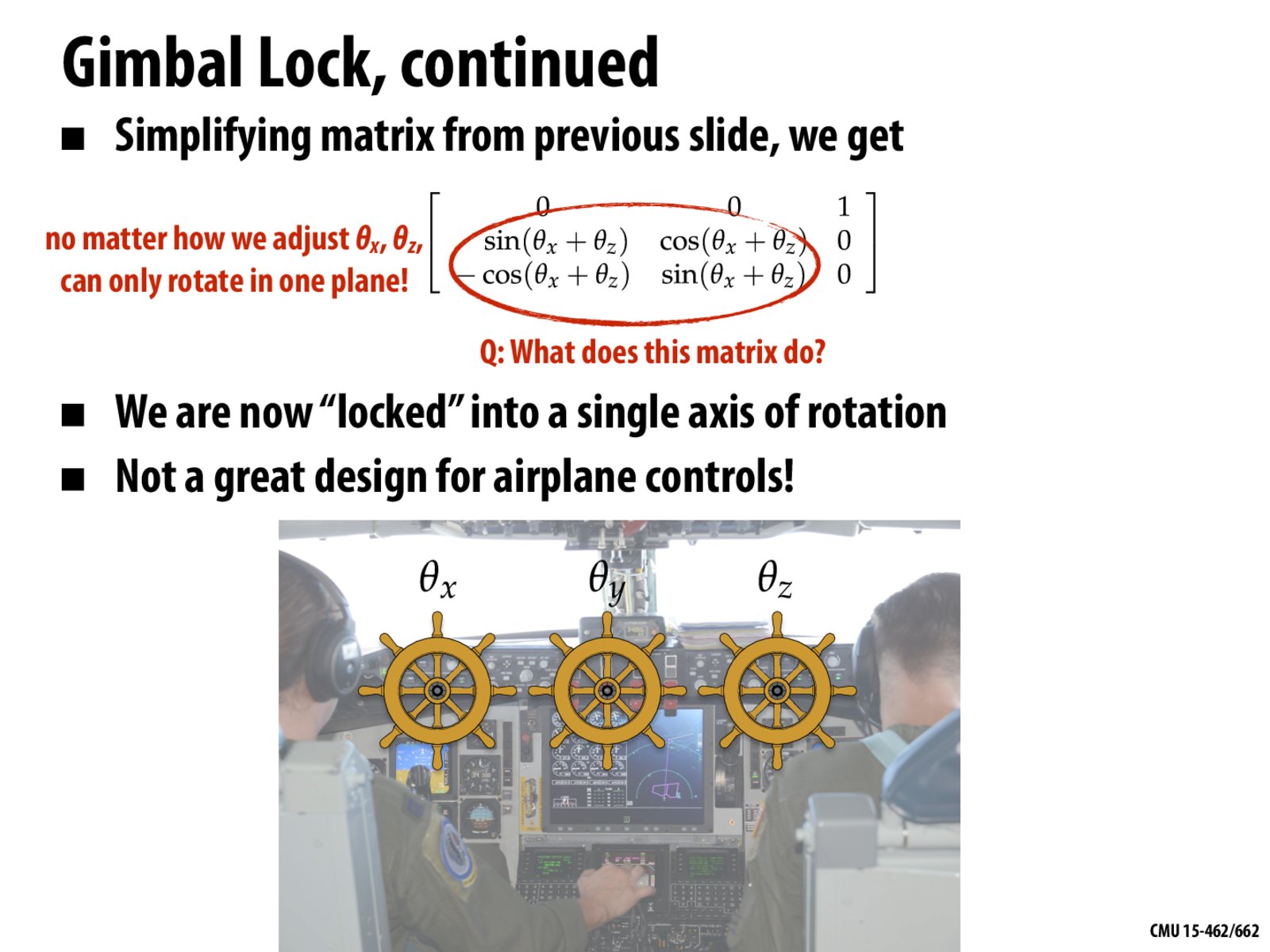
Is the reason that this matrix creates a lock that the expression for z comes out to 1 no matter the angle because of the sin^2 + cos^2 = 1 identity? It seems to hold when you do the multiplication out.
Zishen
confused as well. Does it means that the y is not counted?
Coyote
I've had gimbal lock show up in two classes and I'm still not sure how it works. What exactly does gimbal lock look like in motion?
David
I'm also confused. Does this specific setup prevent further rotations in the future? I thought fixing the y axis was the desired behavior.
Mogician
The missing of theta_y is caused by our assigning theta_y a concrete value, right? How can this become a problem? Does it mean our following transformations of the object depending on the original axis will be limited because of the choice of representation or coordinates?
Oh_skr
I think by setting theta_y to be pi/2, we are basically making two axes (in this case, i think is x and z) parallel to each other, so any changes in theta_x and theta_z apply to the same rotation axis of the object.
Besides Gimbal lock and the complexity of calculations with Euler representations, are there other well-known downsides in using Euler angles?
I am confusing here, as we fixed the theta y on the previous slide, why do we need to change it now? Or why could we change it if we have assumed its value already?
Can gimbal lock still happen if you go from euler->quaternions? Say you want to think about rotations in terms of euler angles, but convert them to quaternions when you apply the actual rotations. Is that ok?
I'm also confused here. We've already specify theta_y to be pi/2, so it make sense we are now performing rotation on theta_x and theta_z only -- we've already finished rotating theta_y?
Same here. I thought we fixed the angle theta_y on the previous slide
Chiming in to agree-- I don't doubt that Gimbal lock is a thing that can happen, but I don't think your explanation in the lecture that it's because only theta_x and theta_z show up in the matrix is correct. After all, there's nothing special about pi/2; no matter which angle we rotate to around the y axis, we have just set theta_y to a constant, so naturally the resulting matrix does not contain theta_y.
I'm still confusded as to how we are no longer able to rotate on one axis, I'm not sure why we can't rotate about the y-axis anymore, since doesn't the original matrix use a theta_y?
I wonder what you mean by saying it is locked; by applying Rz\Ry\Rx the rotation can exactly be like this, so why is it locked?
Is the reason that this matrix creates a lock that the expression for z comes out to 1 no matter the angle because of the sin^2 + cos^2 = 1 identity? It seems to hold when you do the multiplication out.
confused as well. Does it means that the y is not counted?
I've had gimbal lock show up in two classes and I'm still not sure how it works. What exactly does gimbal lock look like in motion?
I'm also confused. Does this specific setup prevent further rotations in the future? I thought fixing the y axis was the desired behavior.
The missing of theta_y is caused by our assigning theta_y a concrete value, right? How can this become a problem? Does it mean our following transformations of the object depending on the original axis will be limited because of the choice of representation or coordinates?
I think by setting theta_y to be pi/2, we are basically making two axes (in this case, i think is x and z) parallel to each other, so any changes in theta_x and theta_z apply to the same rotation axis of the object.