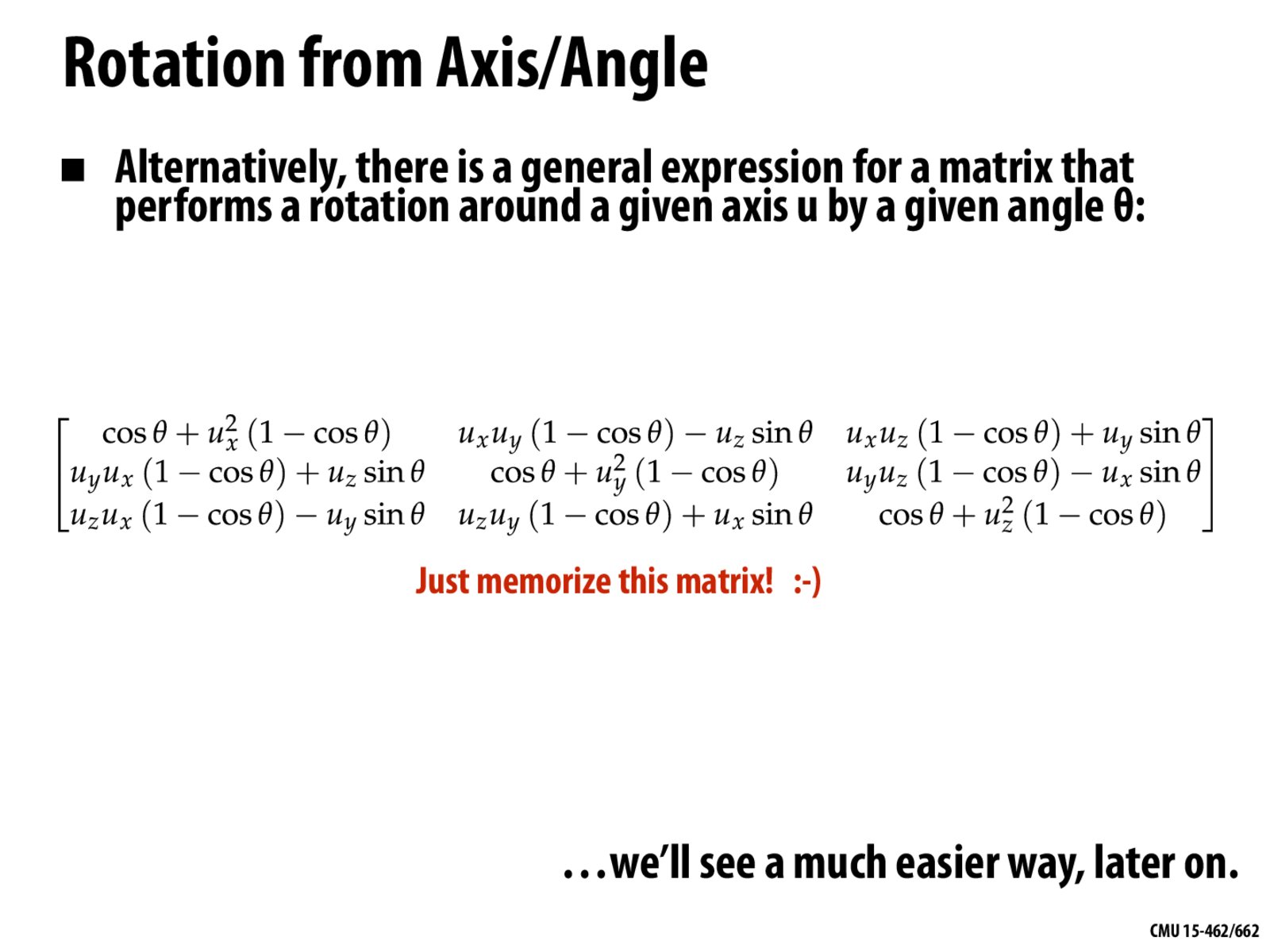
While this may not be practical to memorize, could it still be practical enough to code up?
embl
Can we use quaternions in place of matrices?
Starboy
How will the change of coordinate system affect the matrix?
Murrowow
How exactly was this matrix determined? Even if we are told to just memorize it, it would be significantly easier to understand how it was derived so we can also extend it to more dimensions
MrRockefeller
when i was imagining a scenario to rotate an object to an arbitrary orientation, i had two thoughts:
1. you can reach any orientation with an angle variable with a given axis, defined by a normal vector that has 3 variables
2. you can reach any orientation with two angles, theta and phi, like how we define spherical coordinates
are they both correct? how do i mathematically prove that they require the same number of constraints?
MrRockefeller
another idea that came to my mind is, how do we generalize this rotation idea to n-dimensional space? is it the same that we only need to know the principal axis to perform any arbitrary rotation? and is there any mathematical meaning behind high dimensional rotation, like eigenvalue problems?
jefftan
Is it useful to have specialized hardware that performs these kinds of rotation conversions, or is it sufficient to use normal floating point and matrix operations?
While this may not be practical to memorize, could it still be practical enough to code up?
Can we use quaternions in place of matrices?
How will the change of coordinate system affect the matrix?
How exactly was this matrix determined? Even if we are told to just memorize it, it would be significantly easier to understand how it was derived so we can also extend it to more dimensions
when i was imagining a scenario to rotate an object to an arbitrary orientation, i had two thoughts: 1. you can reach any orientation with an angle variable with a given axis, defined by a normal vector that has 3 variables 2. you can reach any orientation with two angles, theta and phi, like how we define spherical coordinates
are they both correct? how do i mathematically prove that they require the same number of constraints?
another idea that came to my mind is, how do we generalize this rotation idea to n-dimensional space? is it the same that we only need to know the principal axis to perform any arbitrary rotation? and is there any mathematical meaning behind high dimensional rotation, like eigenvalue problems?
Is it useful to have specialized hardware that performs these kinds of rotation conversions, or is it sufficient to use normal floating point and matrix operations?