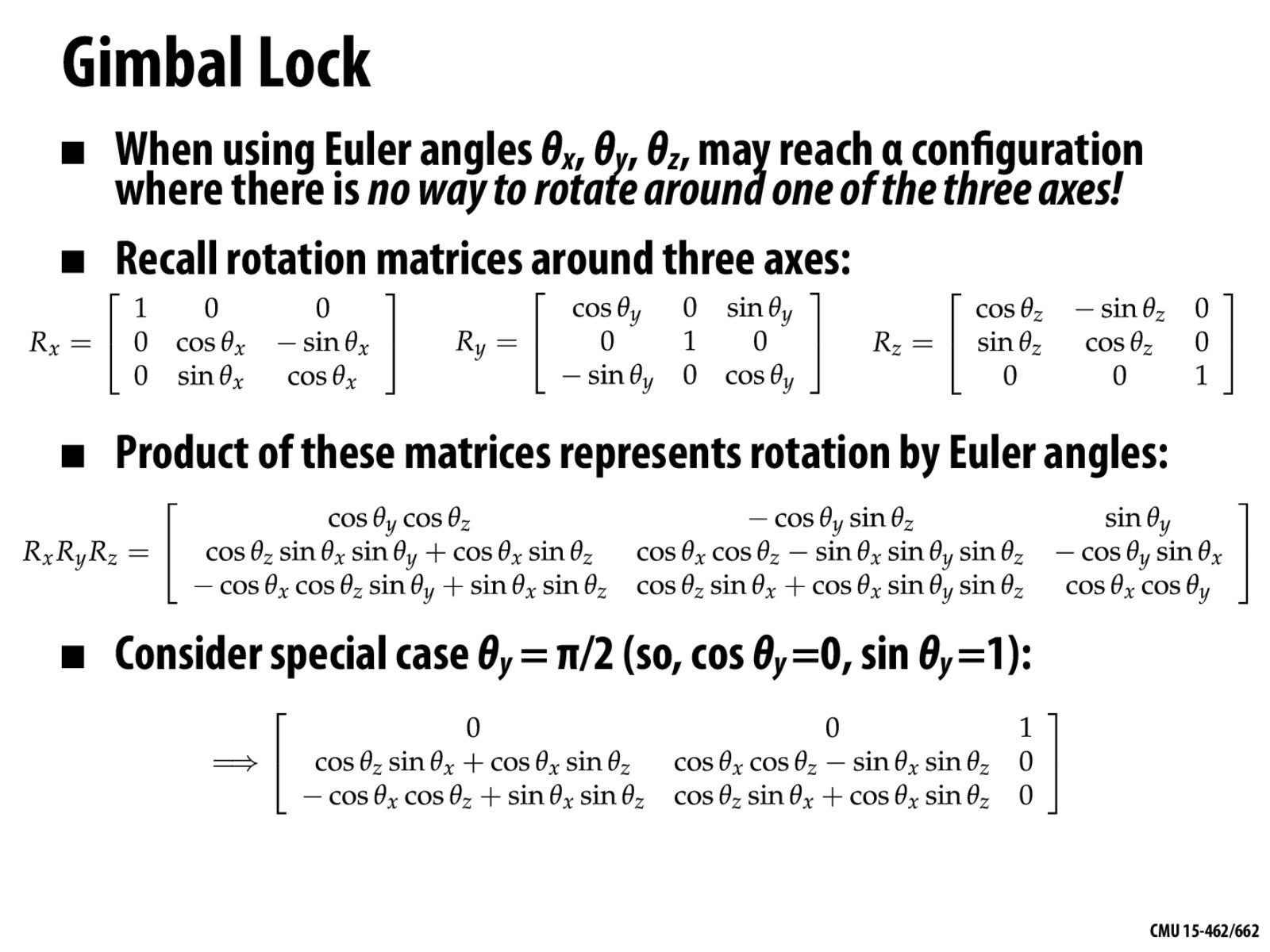
How often would a gimbal lock happen? Does it only occur when rotating in all three axes and theta_y os pi/2?
corgo
Has there been an incident where bad things happened because of their system of rotation? Just curious.
wmarango
Is it possible to detect gimble lock and then reparameterize the three angles such that the overall rotation is equivalent but the three axes become independent again?
birb
Can this be prevented if we don't immediate substitute in the value of theta_y? Like maybe evaluate it at theta_y as needed but also keep storing the original matrix with everything in terms of sin and cos?
ml2
Is rotation by Euler angles commutative? Is there a way to change the order to prevent a Gimbal lock, or will that end up with a different result?
ant123
Why are quarterions a better alternative to gimbal lock?
shoes
Is there a common solution to gimbal lock or is it just best to avoid it?
Marco
Is the matrix formed using Euler angles not memoryless?
yingsi
Would using a different coordinate system solve the lock constraint?
How often would a gimbal lock happen? Does it only occur when rotating in all three axes and theta_y os pi/2?
Has there been an incident where bad things happened because of their system of rotation? Just curious.
Is it possible to detect gimble lock and then reparameterize the three angles such that the overall rotation is equivalent but the three axes become independent again?
Can this be prevented if we don't immediate substitute in the value of theta_y? Like maybe evaluate it at theta_y as needed but also keep storing the original matrix with everything in terms of sin and cos?
Is rotation by Euler angles commutative? Is there a way to change the order to prevent a Gimbal lock, or will that end up with a different result?
Why are quarterions a better alternative to gimbal lock?
Is there a common solution to gimbal lock or is it just best to avoid it?
Is the matrix formed using Euler angles not memoryless?
Would using a different coordinate system solve the lock constraint?