Its understood that if w=0, the points x & y become infinity since undefined because they get divided by w to get back inhomogeneous coordinates, but is there any other intuitive way to understand why w=0 means that those points are at infinity?
harveybia
I read this article and still have a similar confusion as @Asterix had.
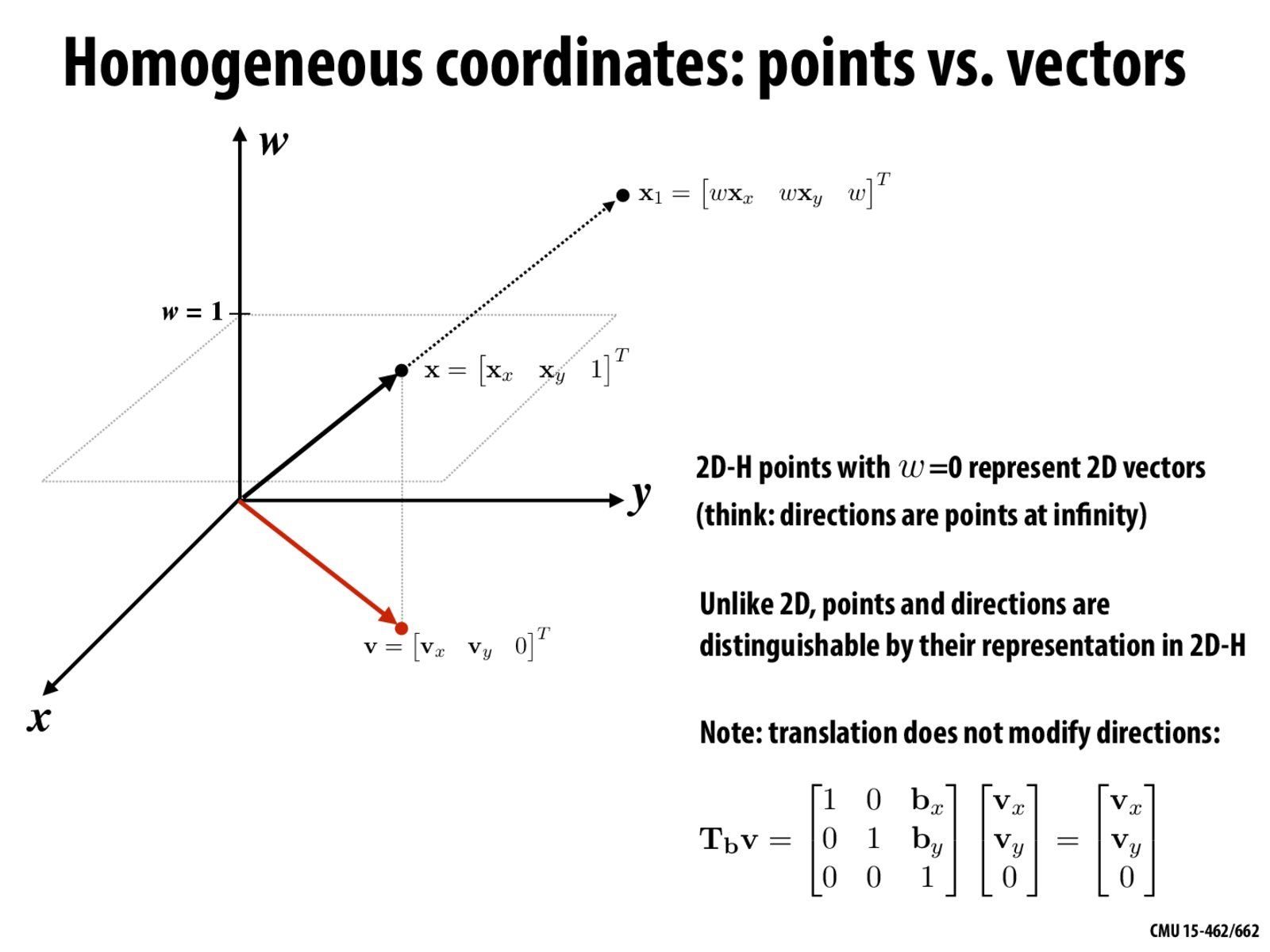
My question is, if [vx, vy, 0] represents a direction, which corresponds to a point at infinity, then what does [2vx, 2vy, 0] represent? It seems to have the same direction but different length. When talking about direction we don't care about magnitude but for vectors we do. Directions are points at infinity, but what are vectors?
Kuragama
My sort of knee-jerk intuition for thinking about homogeneous coordinates was that they describe a position relative to an associated vanishing point for projection. When w approaches zero, we approach the vanishing point, and the differences between positions along that direction become indistinguishable. Hence we simply think of the direction itself. Not sure if this is accurate or a good way of thinking about it, though.
Out of curiosity, do homogeneous coordinates see much use outside of graphics? I've never encountered them anywhere else.
keenan
@Asterix @harveybia Yep, you're all on the right track. What you can imagine is there is a sort of "sphere at infinity" centered around the origin. Something like the night sky, and the stars are "points at infinity." Unlike real stars, each of these points really is an infinite distance away, and so just like (intuitively) 2 x infinity = infinity, multiplying any vector at infinity by a constant just gives you that same point. In homogeneous coordinates this is represented by putting a 0 in the homogeneous coordinate. This interpretation is useful for when you want to think about "directions without magnitude." For instance, it is a nice way of thinking about the set of all oriented lines through the origin, i.e., all lines through the origin, where you distinguish only between the two possible directions for the line. This starts to be the topic of projective geometry.
Of course, you can't deny the fact that (x,y,0) and (2x,2y,0) carry two different sets of values. This can come in handy when we're thinking of these values not as points at infinity, but rather as just ordinary vectors in $\mathbb{R}^3$, rather than points. What do I mean by points vs. vectors in this case? It's related to what we said in our linear algebra review: 'vectors' in this sense don't have basepoints; you can imagine they all "stick out of the origin", whereas 'points' can sit anywhere in space, but have no direction. This may seem like a superficial distinction, until you think about applying transformations to objects represented by points and vectors. For instance, suppose we represent the corners of a cube as points and the normals of a cube as vectors, both using homogeneous coordinates. Both the corners and the normals should "feel" the effect of a rotation, but normals should not feel the effect of a translation: if I translate a cube, its normals don't change. This example is spelled out in detail on the comments for this slide.
sjip
By the concepts of projective geometry, 2 distinct straight line always intersect each other (it could be point at infinity if they are parallel). The same can be said about hyperplanes (or higher dimensional spaces).
I am trying to think intuitively what this really means. If we try to draw 2 parallel lines on a 2d screen, the distance between the line decreases and ultimately they meet at point.
Does this mean projective geometry is a way to represent higher dimensional space (with infinity bounds) on a 2d plane? Is there a better intuition to projective geometry?
Its understood that if w=0, the points x & y become infinity since undefined because they get divided by w to get back inhomogeneous coordinates, but is there any other intuitive way to understand why w=0 means that those points are at infinity?
I read this article and still have a similar confusion as @Asterix had.
https://www.tomdalling.com/blog/modern-opengl/explaining-homogenous-coordinates-and-projective-geometry/
My question is, if [vx, vy, 0] represents a direction, which corresponds to a point at infinity, then what does [2vx, 2vy, 0] represent? It seems to have the same direction but different length. When talking about direction we don't care about magnitude but for vectors we do. Directions are points at infinity, but what are vectors?
My sort of knee-jerk intuition for thinking about homogeneous coordinates was that they describe a position relative to an associated vanishing point for projection. When w approaches zero, we approach the vanishing point, and the differences between positions along that direction become indistinguishable. Hence we simply think of the direction itself. Not sure if this is accurate or a good way of thinking about it, though.
Out of curiosity, do homogeneous coordinates see much use outside of graphics? I've never encountered them anywhere else.
@Asterix @harveybia Yep, you're all on the right track. What you can imagine is there is a sort of "sphere at infinity" centered around the origin. Something like the night sky, and the stars are "points at infinity." Unlike real stars, each of these points really is an infinite distance away, and so just like (intuitively) 2 x infinity = infinity, multiplying any vector at infinity by a constant just gives you that same point. In homogeneous coordinates this is represented by putting a 0 in the homogeneous coordinate. This interpretation is useful for when you want to think about "directions without magnitude." For instance, it is a nice way of thinking about the set of all oriented lines through the origin, i.e., all lines through the origin, where you distinguish only between the two possible directions for the line. This starts to be the topic of projective geometry.
Of course, you can't deny the fact that (x,y,0) and (2x,2y,0) carry two different sets of values. This can come in handy when we're thinking of these values not as points at infinity, but rather as just ordinary vectors in $\mathbb{R}^3$, rather than points. What do I mean by points vs. vectors in this case? It's related to what we said in our linear algebra review: 'vectors' in this sense don't have basepoints; you can imagine they all "stick out of the origin", whereas 'points' can sit anywhere in space, but have no direction. This may seem like a superficial distinction, until you think about applying transformations to objects represented by points and vectors. For instance, suppose we represent the corners of a cube as points and the normals of a cube as vectors, both using homogeneous coordinates. Both the corners and the normals should "feel" the effect of a rotation, but normals should not feel the effect of a translation: if I translate a cube, its normals don't change. This example is spelled out in detail on the comments for this slide.
By the concepts of projective geometry, 2 distinct straight line always intersect each other (it could be point at infinity if they are parallel). The same can be said about hyperplanes (or higher dimensional spaces).
I am trying to think intuitively what this really means. If we try to draw 2 parallel lines on a 2d screen, the distance between the line decreases and ultimately they meet at point.
Does this mean projective geometry is a way to represent higher dimensional space (with infinity bounds) on a 2d plane? Is there a better intuition to projective geometry?