If we are given a dataset of a mesh or a point cloud, how can we know whether it is a manifold or not without viewing it in 3D space, or just figure it out from raw datasets mathematically?
If we slightly smooth or simply remove the sharp point of the hourglass at the right-down corner, it would be a "qualified" manifold. It seems kind of tricky to make a decision that whether a point cloud or a mesh is a manifold or not since it depends on how many points or details we have. My question is what is the "border" between manifold and non-manifold?
keenan
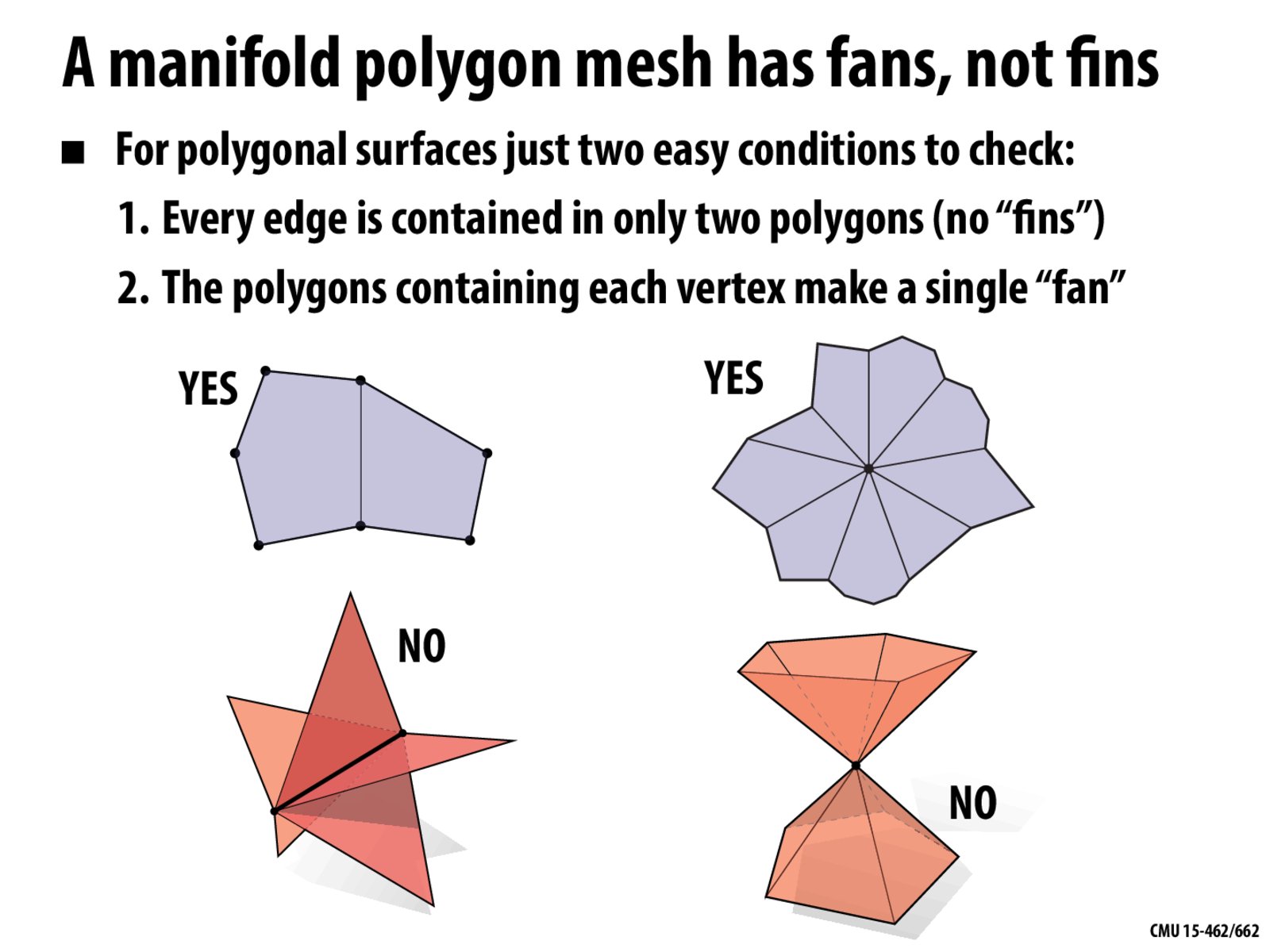
@Leslie The distinction between manifold and nonmanifold is a completely binary one: you're either manifold or you're not! For a polygon mesh, making this determination is straightforward: for each edge, count the number of polygons containing it. Is that number more than 3? If so, it's not manifold. Next, for each vertex, find all the polygons containing it. Can these polygons be put in a single cyclic order? If not, it's not manifold. Otherwise, it is. These checks can easily be done using simple deterministic algorithms. (Though for your assignment, you can safely assume that we're giving you manifold meshes---because they're being handed to you as half edge meshes!)
Also note that "smooth" versus "sharp" does not matter when it comes to (topological) manifolds. For instance, a piece of paper with a sharp crease is still manifold. A better way to think about it is: in a small region around every point on the surface, can I put down a little grid with clear x- and y- directions? (Or, as we mused about in class: can I imagine putting down a "city grid" near this point.) If not, the surface is not manifold at this point.
If we are given a dataset of a mesh or a point cloud, how can we know whether it is a manifold or not without viewing it in 3D space, or just figure it out from raw datasets mathematically? If we slightly smooth or simply remove the sharp point of the hourglass at the right-down corner, it would be a "qualified" manifold. It seems kind of tricky to make a decision that whether a point cloud or a mesh is a manifold or not since it depends on how many points or details we have. My question is what is the "border" between manifold and non-manifold?
@Leslie The distinction between manifold and nonmanifold is a completely binary one: you're either manifold or you're not! For a polygon mesh, making this determination is straightforward: for each edge, count the number of polygons containing it. Is that number more than 3? If so, it's not manifold. Next, for each vertex, find all the polygons containing it. Can these polygons be put in a single cyclic order? If not, it's not manifold. Otherwise, it is. These checks can easily be done using simple deterministic algorithms. (Though for your assignment, you can safely assume that we're giving you manifold meshes---because they're being handed to you as half edge meshes!)
Also note that "smooth" versus "sharp" does not matter when it comes to (topological) manifolds. For instance, a piece of paper with a sharp crease is still manifold. A better way to think about it is: in a small region around every point on the surface, can I put down a little grid with clear x- and y- directions? (Or, as we mused about in class: can I imagine putting down a "city grid" near this point.) If not, the surface is not manifold at this point.