What do we do when our generalized coordinate is a vector (i.e. position instead of angle)?
Eaglee
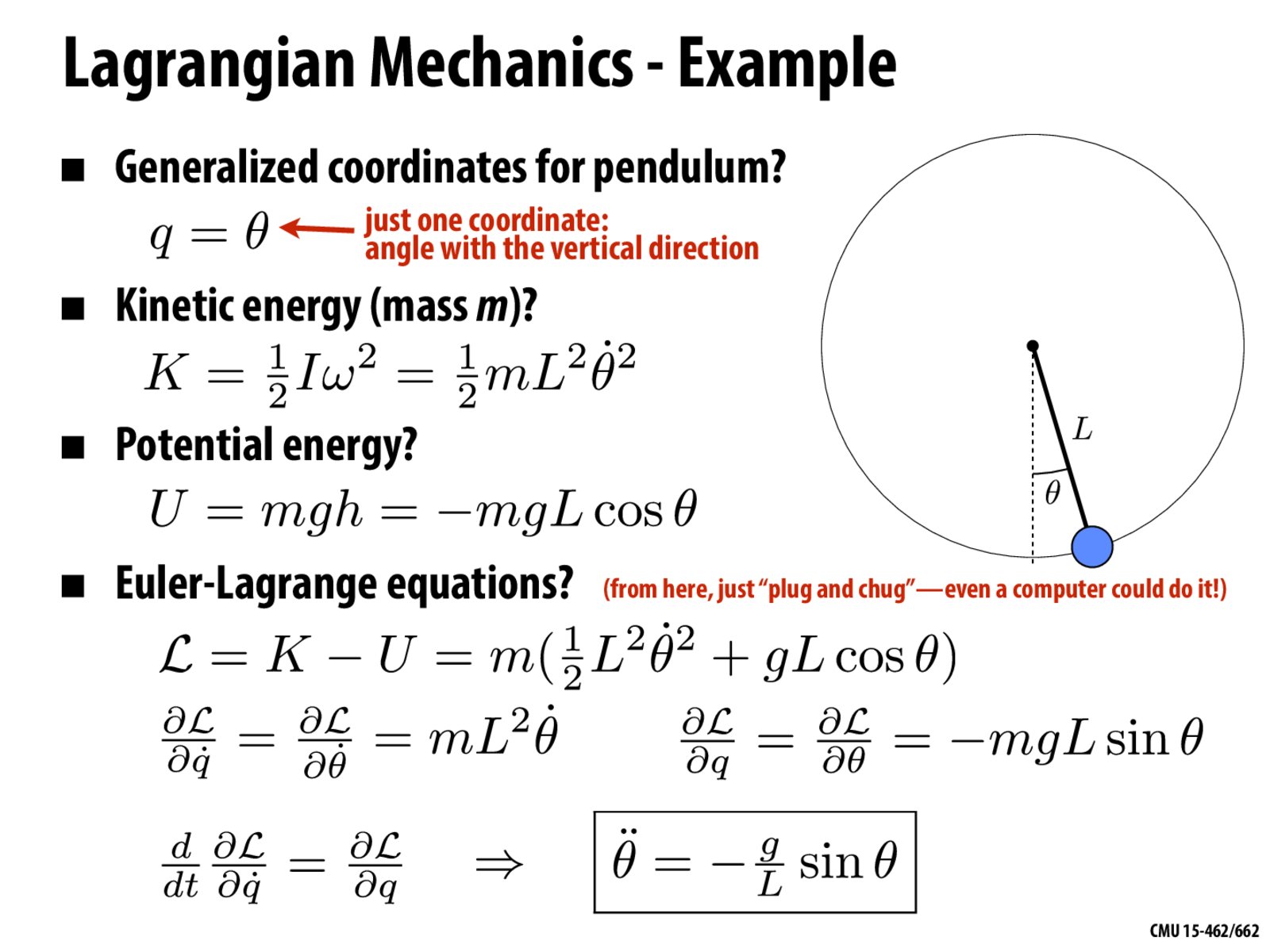
Also, I'm not sure I get the last line at the bottom of the slide. How do we get the acceleration of theta?
xTheBHox
It would be significant more complicated if we were using position vector wrt origin instead of the angle, right?
ruoyuanz
Does potential energy have to be negative?
keenan
@Eaglee Short answer: you just do the same thing for each component of the vector! That's the beautiful thing about generalized coordinates: once you've "stacked" all the degrees of freedom into a single vector, you're just doing the same calculation on each scalar component.
keenan
@Eaglee We took the time derivative of the $\partial L/\partial\dot{\theta}$ term, as in the Euler-Lagrange equations.
keenan
@xTheBHox Yes, because you would need to write down a version of this Lagrangian machinery which accommodates constraints. Such a version does exist; we didn't cover it here.
keenan
@ruoyuanz No, not at all. In fact, adding an arbitrary constant (positive or negative) to the potential will not affect the dynamics, since the forces are derivatives of the potential (and the derivative of a constant is zero).
What do we do when our generalized coordinate is a vector (i.e. position instead of angle)?
Also, I'm not sure I get the last line at the bottom of the slide. How do we get the acceleration of theta?
It would be significant more complicated if we were using position vector wrt origin instead of the angle, right?
Does potential energy have to be negative?
@Eaglee Short answer: you just do the same thing for each component of the vector! That's the beautiful thing about generalized coordinates: once you've "stacked" all the degrees of freedom into a single vector, you're just doing the same calculation on each scalar component.
@Eaglee We took the time derivative of the $\partial L/\partial\dot{\theta}$ term, as in the Euler-Lagrange equations.
@xTheBHox Yes, because you would need to write down a version of this Lagrangian machinery which accommodates constraints. Such a version does exist; we didn't cover it here.
@ruoyuanz No, not at all. In fact, adding an arbitrary constant (positive or negative) to the potential will not affect the dynamics, since the forces are derivatives of the potential (and the derivative of a constant is zero).