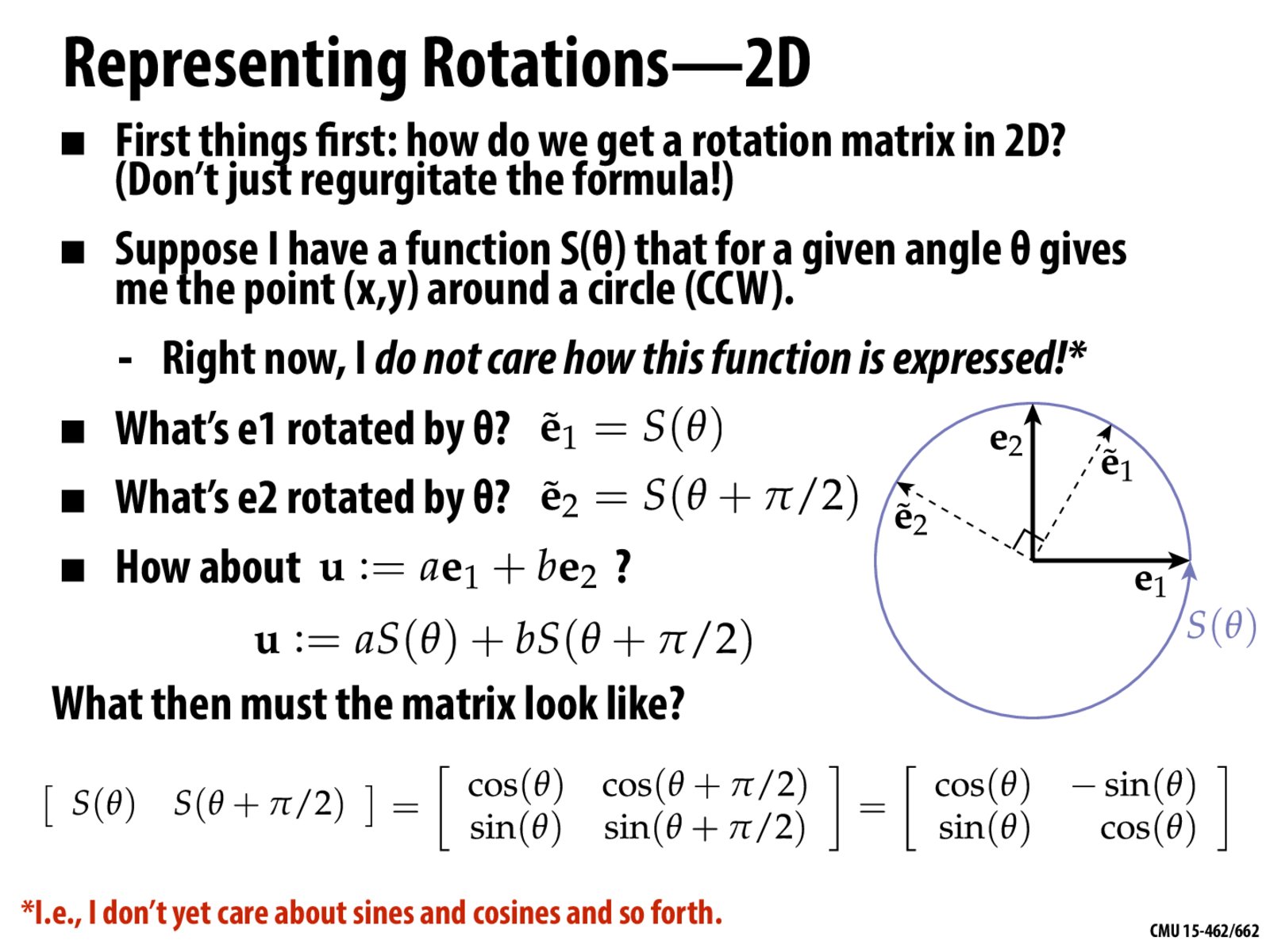
Can we apply similar logic in 3D? Say for example we assume some set of arbitrary rotations w.r.t any of the axes and then use the transfomed coordinates of the basis e1,e2,e3 to find the combined rotation matrix. This would give us the combined rotation matrix which one would otherwise find by multiplying 2-3 matrices together.
djevans
Yeah you can apply it to 3D. This is actually one way to do the quiz.
Can we apply similar logic in 3D? Say for example we assume some set of arbitrary rotations w.r.t any of the axes and then use the transfomed coordinates of the basis e1,e2,e3 to find the combined rotation matrix. This would give us the combined rotation matrix which one would otherwise find by multiplying 2-3 matrices together.
Yeah you can apply it to 3D. This is actually one way to do the quiz.