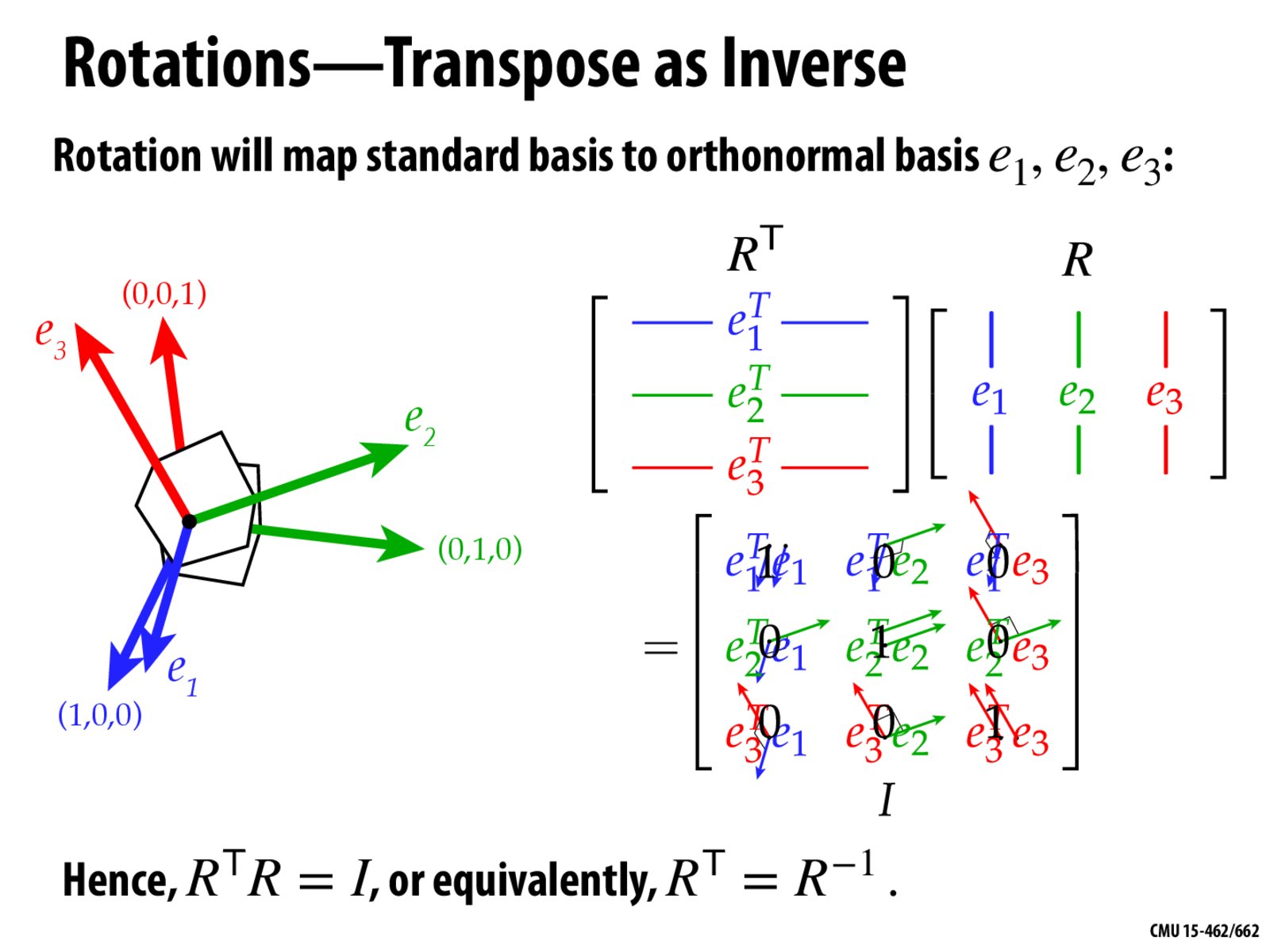
Does this mean that to apply a rotation that is equal and opposite of R, you can instead multiply by R^T? Or am I too tired to be thinking about linear algebra right now
bobzhangyc
To dshernan, this means that R^T will rotate as opposite to R.
daria
What's the geometric meaning of rotating by R^T
abigalekim
I don't really understand how this works. Does it work just because of the change of basis method? Matrix multiplication? Inverses?
mangopi
Does the orthonormal basis preserve the magnitudes of the standard basis/would the graphic look different if the magnitudes of (e1,e2,e3) were larger/smaller?
embl
This may not be related, but we often see that instead of multiplying by R in front of the vector/shape, we multiply the transpose of the R on the back such that is does the same operation. In which cases would we do this?
Mogician
Frequently I see rotations represented by quaternion. What is the relationship with this and what is the pros and cons compared to this?
Does this mean that to apply a rotation that is equal and opposite of R, you can instead multiply by R^T? Or am I too tired to be thinking about linear algebra right now
To dshernan, this means that R^T will rotate as opposite to R.
What's the geometric meaning of rotating by R^T
I don't really understand how this works. Does it work just because of the change of basis method? Matrix multiplication? Inverses?
Does the orthonormal basis preserve the magnitudes of the standard basis/would the graphic look different if the magnitudes of (e1,e2,e3) were larger/smaller?
This may not be related, but we often see that instead of multiplying by R in front of the vector/shape, we multiply the transpose of the R on the back such that is does the same operation. In which cases would we do this?
Frequently I see rotations represented by quaternion. What is the relationship with this and what is the pros and cons compared to this?