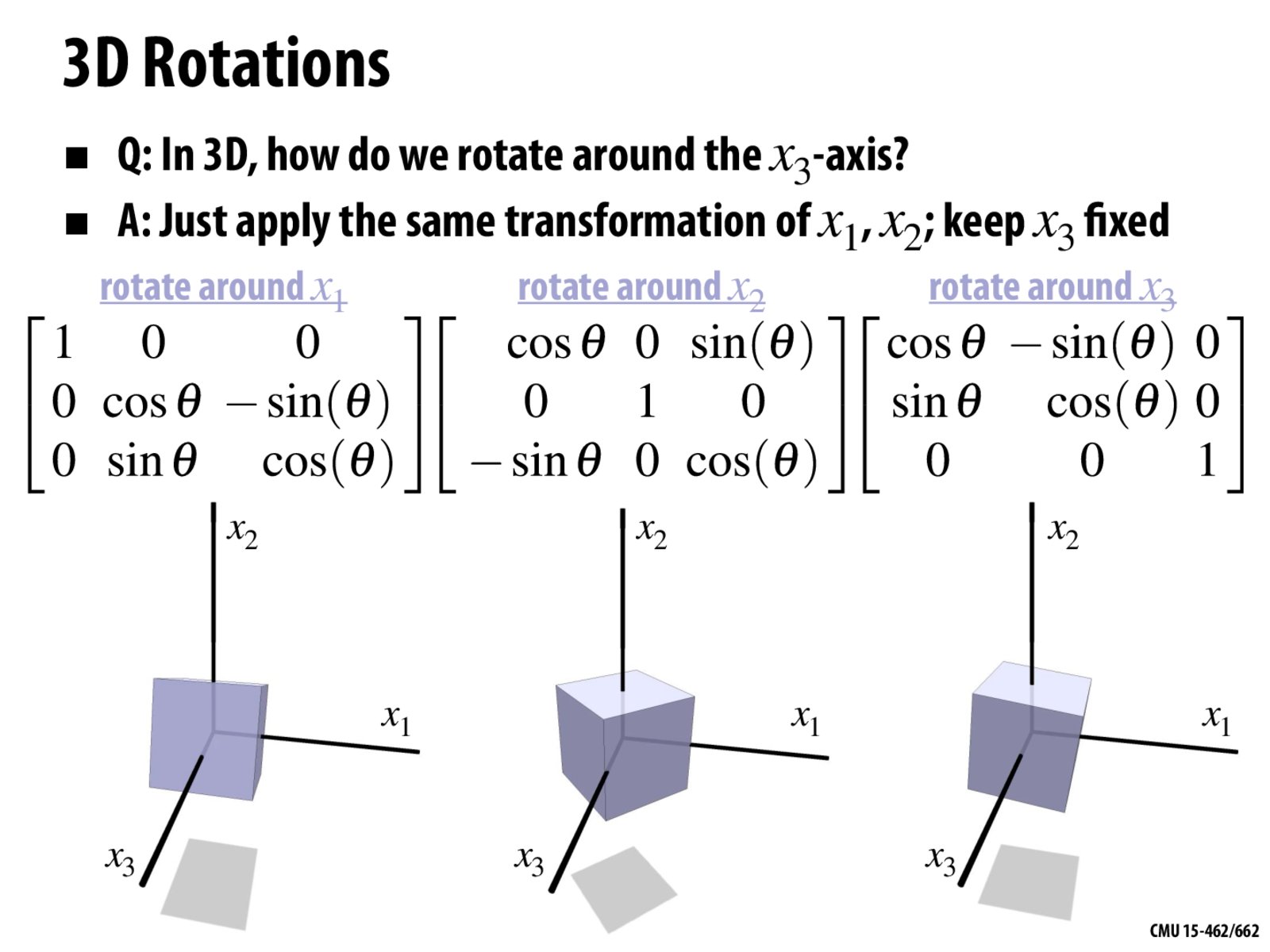
Does the location of the negative sign (top right, bottom left, top right) for the sin components determine the direction of rotation?
yingsi
Can the rotation matrix be scalable to or programmable for higher dimensions?
superbluecat
Can any rotation be conveniently decomposed as a combination of these three matrices?
jefftan
It seems like there is redundancy in some of the 9 values in a 3x3 rotation matrix. Are there more efficient ways to specify rotations that don’t take 9 numbers?
derk
How would you rotate an object about an arbitrary vector/axis in 3D?
anag
Does the orientation of the axes affect how we'd write these rotation matrices? If so do we stick to one standard base orientation?
Kaxano
What matrix would we use for rotation about axis xi in n dimensions?
Joshua
Can you explain the direction of rotation between two frames? Because when dealing with real problems, it always happens that mistakes in relative rotation lead to bad results, e.g. when transforming points from frame a to frame b, should we multiply rotation from a to b or b to a, and how to define rotation from a to b?
Oh_skr
When encoding a rotation, is it more convenient to first multiply these three matrices together (and save the result), and then plug in angle, because calculating matrix multiplication for every rotation seems costly.
kurt
Why does rotation around x2 matrix a bit different from the other 2 matrices?
viceversa
If we want to rotate around a self-defined axis, should we change all our point values to be based on the new axes or should we use the angle between the new axis and the original axis? Which would be easier for calculation and is picked in real life?
Does the location of the negative sign (top right, bottom left, top right) for the sin components determine the direction of rotation?
Can the rotation matrix be scalable to or programmable for higher dimensions?
Can any rotation be conveniently decomposed as a combination of these three matrices?
It seems like there is redundancy in some of the 9 values in a 3x3 rotation matrix. Are there more efficient ways to specify rotations that don’t take 9 numbers?
How would you rotate an object about an arbitrary vector/axis in 3D?
Does the orientation of the axes affect how we'd write these rotation matrices? If so do we stick to one standard base orientation?
What matrix would we use for rotation about axis xi in n dimensions?
Can you explain the direction of rotation between two frames? Because when dealing with real problems, it always happens that mistakes in relative rotation lead to bad results, e.g. when transforming points from frame a to frame b, should we multiply rotation from a to b or b to a, and how to define rotation from a to b?
When encoding a rotation, is it more convenient to first multiply these three matrices together (and save the result), and then plug in angle, because calculating matrix multiplication for every rotation seems costly.
Why does rotation around x2 matrix a bit different from the other 2 matrices?
If we want to rotate around a self-defined axis, should we change all our point values to be based on the new axes or should we use the angle between the new axis and the original axis? Which would be easier for calculation and is picked in real life?