What makes power a better choice? Why does it outperform f(q0, q1, t) = q0 + t * (q1 - q0)?
sm022
How does the Slerp approach implementation compare to the efficiency of the Euler interpolation or other interpolation methods? Are there situations where it is ideal to select one of the less accurate interpolation methods over the Slerp approach?
willowpet
Why did the Euler interpolation seem to speed up/slow down as we saw previously?
tianez
It was mentioned earlier that Euler angles cannot interpolate into all possible rotations. Is the speedup mentioned on this slide a different issue? Or was the speedup we saw caused by some rotations missing?
bunnybun99
What does the t represent in the Slerp equation?
ShallowDream
You said "wiggles the least", so does that mean there is still some inconsistency/weird wiggles along the way using quaternion?
jonasjiang
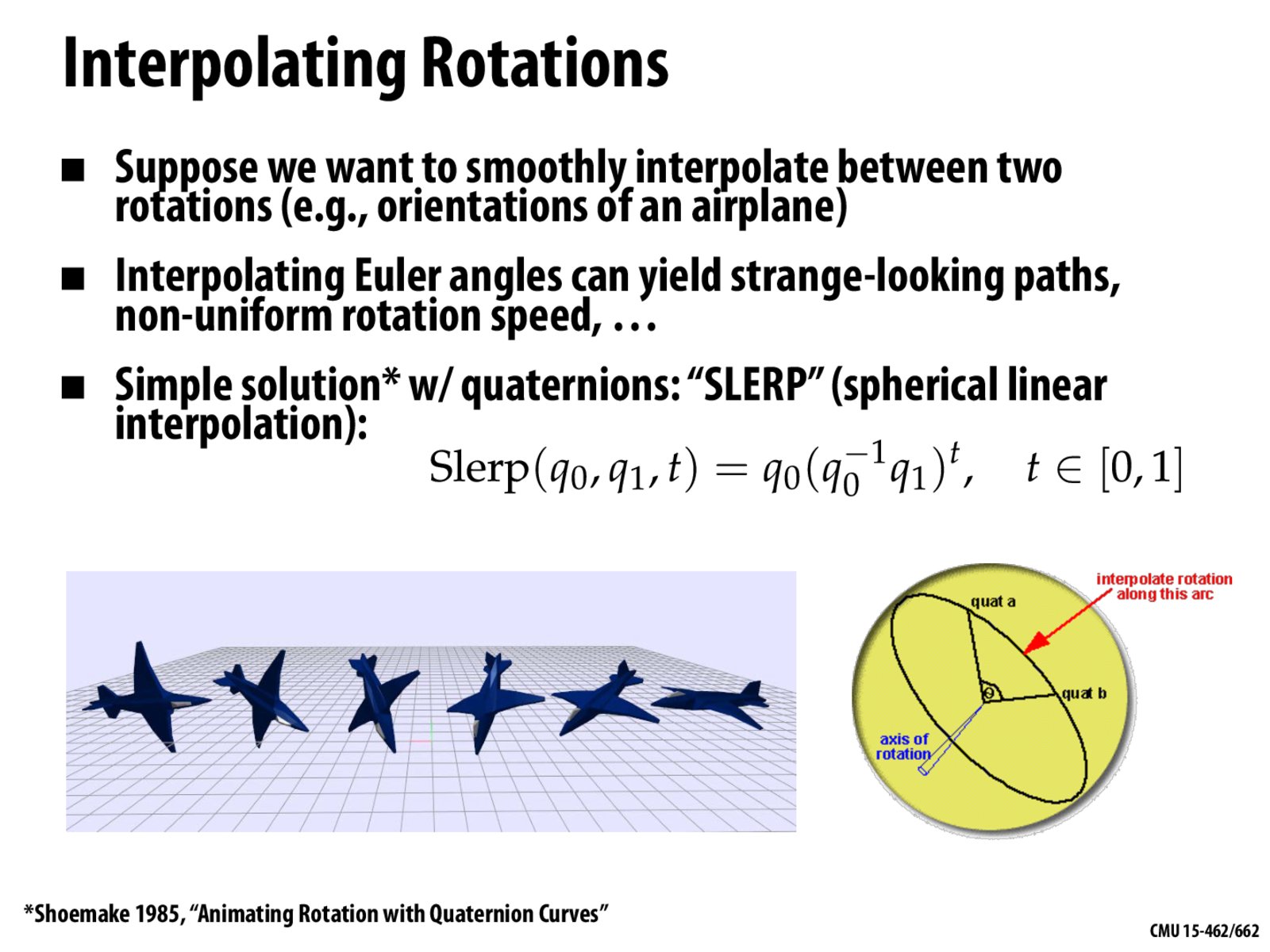
Is the Slerp function result equivalent to a vector along the arc?
anag
Is there a mathematical reason this Slerp approach is smoother/less problematic compared to the Euler angles?
siamese
What is the intuition behind the formula for Slerp?
jcm
What does q0^(-1)q1 represent?
Bellala
What's the explanation of the SLERP equation?
gtchuang
I was trying to find some cool interpolation videos using SLERP and came across this:
https://www.youtube.com/watch?v=PDRItEuaVR4
What makes power a better choice? Why does it outperform f(q0, q1, t) = q0 + t * (q1 - q0)?
How does the Slerp approach implementation compare to the efficiency of the Euler interpolation or other interpolation methods? Are there situations where it is ideal to select one of the less accurate interpolation methods over the Slerp approach?
Why did the Euler interpolation seem to speed up/slow down as we saw previously?
It was mentioned earlier that Euler angles cannot interpolate into all possible rotations. Is the speedup mentioned on this slide a different issue? Or was the speedup we saw caused by some rotations missing?
What does the t represent in the Slerp equation?
You said "wiggles the least", so does that mean there is still some inconsistency/weird wiggles along the way using quaternion?
Is the Slerp function result equivalent to a vector along the arc?
Is there a mathematical reason this Slerp approach is smoother/less problematic compared to the Euler angles?
What is the intuition behind the formula for Slerp?
What does q0^(-1)q1 represent?
What's the explanation of the SLERP equation?
I was trying to find some cool interpolation videos using SLERP and came across this: https://www.youtube.com/watch?v=PDRItEuaVR4
No idea what it is, but it looks pretty cool.