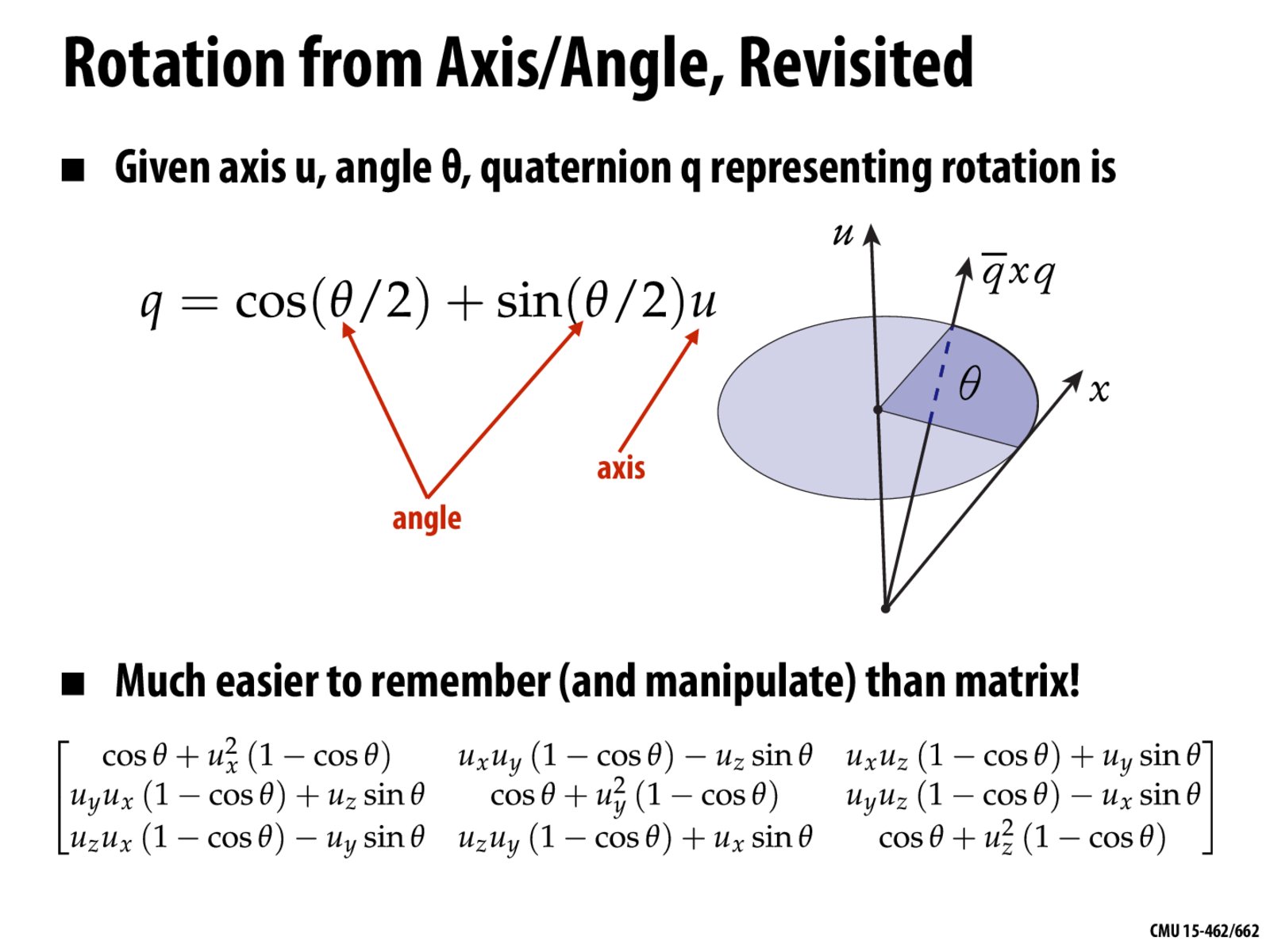
Would it be possible to go over an example of what q bar, q, and x are and why this works out the way it does? I didn't quite follow where theta and u are coming from.
dchen2
This seems very unintuitive because in particular, rotating by 0 does nothing as expected, but rotating by 2pi reflects x twice. Although correct, I don't see why the two reflections are necessary. Is there a geometric reason behind the usage of half angles, or is there an equivalent formulation for q that is more insightful?
Concurrensee
Is there any special situation that rotation by matrix can compute more faster than complex form?
corgo
I'd love to have an example of actually doing something with q bar and q. Things are moving so fast in the lecture. T_T
gloose
I'm having a hard time understanding how the first component of the quaternion fits into all of this, like what does it mean geometrically? Is there an intuitive explanation for why we set it to cos(theta/2) here?
superbluecat
Is there a polar form of q so the geometric meaning of quaterions can be made clearer?
snaminen
Why is q constructed like this? I don't understand the geometric meaning of this equation in this picture.
manchas
Is the axis u in terms of quaternions? Additionally, is the real part essentially just reduced to a scaling factor? In that case why do we need it?
Oh_skr
Is this process reversible? When two out of the three values in u, theta, and q are known, is it possible/easy to find the third?
tcarey
Do we represent these as a matrix or a vector when we actually perform transformations? It seems like it could be done with a vector but it would probably be easier to keep things 4x4
Would it be possible to go over an example of what q bar, q, and x are and why this works out the way it does? I didn't quite follow where theta and u are coming from.
This seems very unintuitive because in particular, rotating by 0 does nothing as expected, but rotating by 2pi reflects x twice. Although correct, I don't see why the two reflections are necessary. Is there a geometric reason behind the usage of half angles, or is there an equivalent formulation for q that is more insightful?
Is there any special situation that rotation by matrix can compute more faster than complex form?
I'd love to have an example of actually doing something with q bar and q. Things are moving so fast in the lecture. T_T
I'm having a hard time understanding how the first component of the quaternion fits into all of this, like what does it mean geometrically? Is there an intuitive explanation for why we set it to cos(theta/2) here?
Is there a polar form of q so the geometric meaning of quaterions can be made clearer?
Why is q constructed like this? I don't understand the geometric meaning of this equation in this picture.
Is the axis u in terms of quaternions? Additionally, is the real part essentially just reduced to a scaling factor? In that case why do we need it?
Is this process reversible? When two out of the three values in u, theta, and q are known, is it possible/easy to find the third?
Do we represent these as a matrix or a vector when we actually perform transformations? It seems like it could be done with a vector but it would probably be easier to keep things 4x4