Why angle theta needs to be divided by two? I got lost here.
zhenliz
One questions is that, why in SLAM, axis-angle is more frequently used while in graphics, in seems that quaternion is more often used?
graphicstar11
Would we have to remember that matrix transformation and compute that for the exam?
keenan
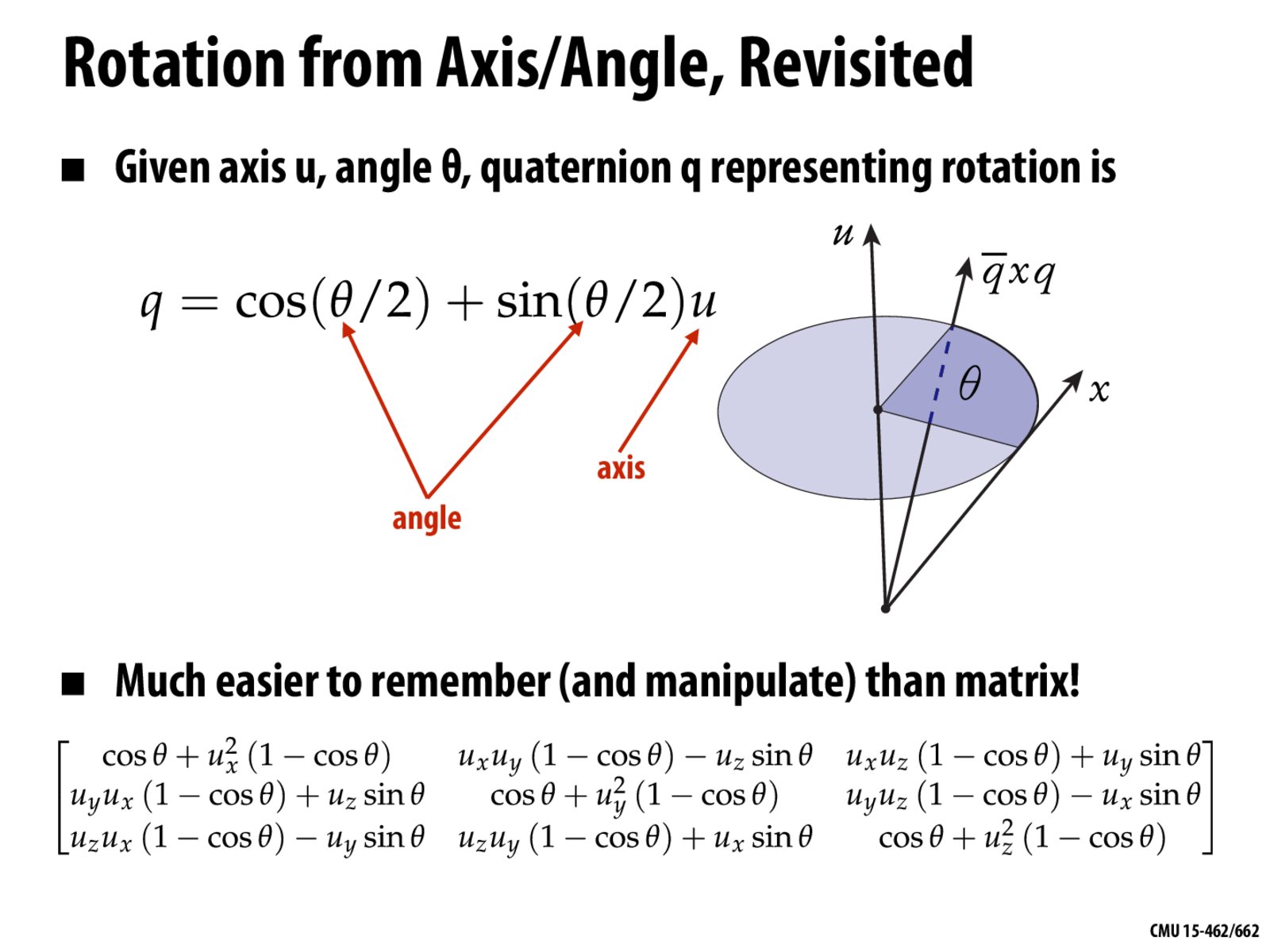
@peanut Recall that to rotate a vector $x = ai + bj + ck$ via a rotation $q = \cos(\theta/2) + \sin(\theta/2)u$ (where $u$ is a unit, imaginary quaternion) you apply the action $x \mapsto qx\bar{q}$. Intuitively what happens is that, since $q$ appears twice, each application of $q$ should only apply "half the angle." (To see that this really works, and gives a rotation by the angle $\theta$, you have to multiply it out!)
keenan
@zhenliz Honestly quaternion and axis-angle representations are extremely closely related. In the quaternion setting, you take an axis $u$ and angle $\theta$ and construct the quaternion $q = \cos(\theta/2) + \sin(\theta/2)u$. This is really not such a far cry from Rodrigues' rotation formula for taking an axis and angle to a rotation matrix, via sines and cosines. To go the other direction (from a quaternion to an axis-angle rotation), you likewise have to perform something like a matrix logarithm---which you also have to do in the axis-angle representation.
In general, when you see two different communities adopting different ideas, conventions, philosophies, dogmas, etc., it can be good to ask, "how are these ideas secretly alike?" (rather than, say, "which one is better"). Nature often provides only one real way to do something; many of the apparent distinctions are often only cultural, historical, etc.
keenan
@graphicstar11 Definitely not! My aim is to help you learn how to think about graphics; not how to memorize esoteric facts. ;-)
Why angle theta needs to be divided by two? I got lost here.
One questions is that, why in SLAM, axis-angle is more frequently used while in graphics, in seems that quaternion is more often used?
Would we have to remember that matrix transformation and compute that for the exam?
@peanut Recall that to rotate a vector $x = ai + bj + ck$ via a rotation $q = \cos(\theta/2) + \sin(\theta/2)u$ (where $u$ is a unit, imaginary quaternion) you apply the action $x \mapsto qx\bar{q}$. Intuitively what happens is that, since $q$ appears twice, each application of $q$ should only apply "half the angle." (To see that this really works, and gives a rotation by the angle $\theta$, you have to multiply it out!)
@zhenliz Honestly quaternion and axis-angle representations are extremely closely related. In the quaternion setting, you take an axis $u$ and angle $\theta$ and construct the quaternion $q = \cos(\theta/2) + \sin(\theta/2)u$. This is really not such a far cry from Rodrigues' rotation formula for taking an axis and angle to a rotation matrix, via sines and cosines. To go the other direction (from a quaternion to an axis-angle rotation), you likewise have to perform something like a matrix logarithm---which you also have to do in the axis-angle representation.
In general, when you see two different communities adopting different ideas, conventions, philosophies, dogmas, etc., it can be good to ask, "how are these ideas secretly alike?" (rather than, say, "which one is better"). Nature often provides only one real way to do something; many of the apparent distinctions are often only cultural, historical, etc.
@graphicstar11 Definitely not! My aim is to help you learn how to think about graphics; not how to memorize esoteric facts. ;-)