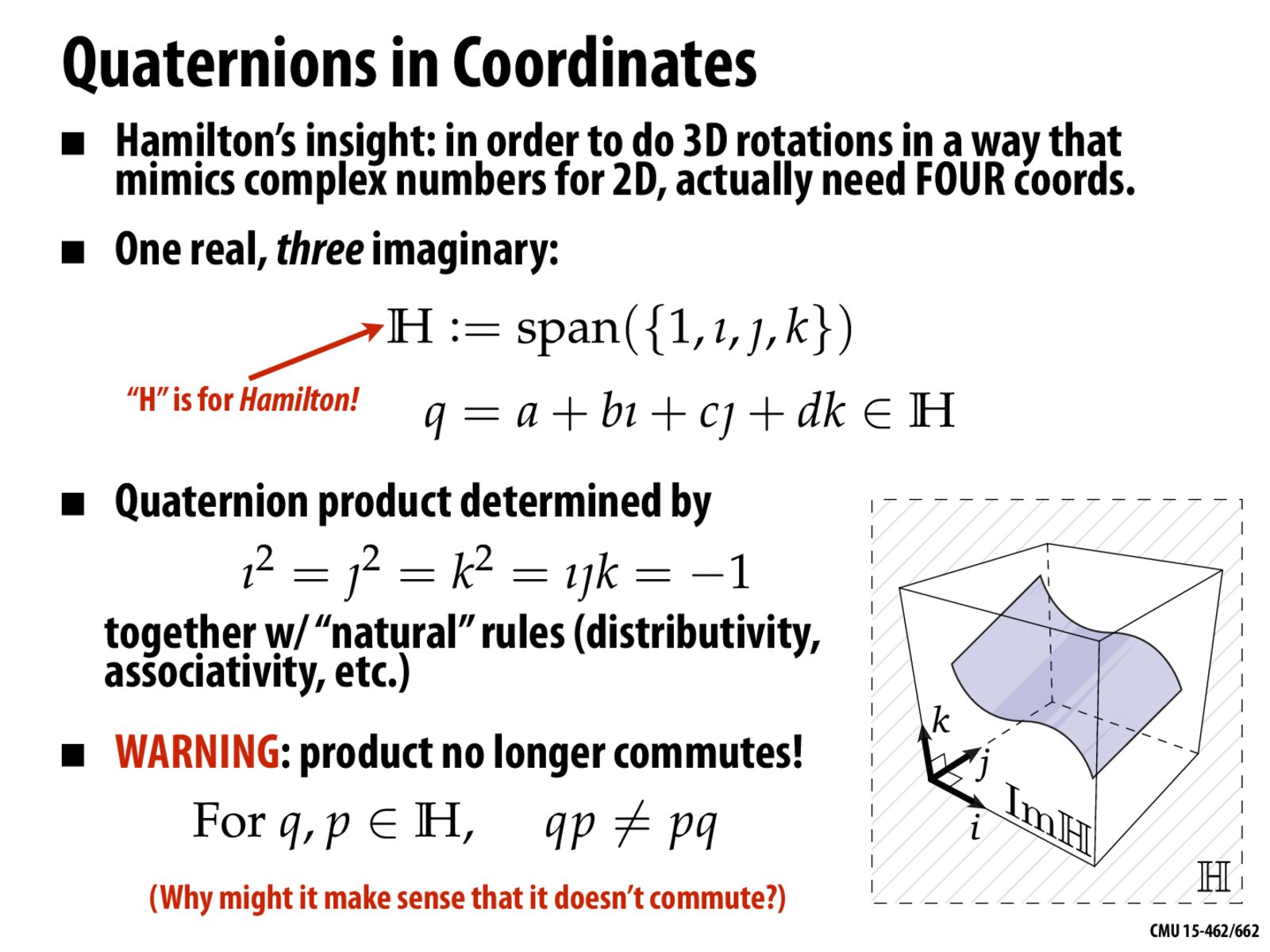
Ah, I jumped a gun on this slide cause I was curious but it appears my question in the previous lecture was addressed. We are discussing quaternions with respect to rotations.
peanut
Could anyone explains to me why qp != pq from the formula? I can't see why i.e. b1b2i will differ from b2b1i
marshmallow
@peanut, I don't know if this'll answer your question, but if you look at the equation ijk = -1, depending on how you multiply, you get different results.
For example,
ijk = -1 (multiply by k on the right)
ijk^2 = -k
ij(-1) = -k
ij = k
But,
ijk = -1 (multiply by ji on the left)
jiijk = ji(-1)
j(-1)jk = ji(-1)
j^2k = ji
-k = ji
ji = -k
peanut
@marshmallow Thanks! This explanation is so clear.
oadrian96
The queternion equality makes a lot of sense, especially when you explain it geometrically. Can't imagine how Hamilton must have felt when it all clicked after so many years!
Bananya
@marshmallow gave a very nice explanation. But I still find it hard to understand it geometrically...
jlessioh
I agree with @Bananya that I understand the math behind this, but I am having a lot of trouble visualizing it.
Azure
I suppose it kinda works like the right hand rule and cross products, like if you let i = x, j = y, k = z, then ij = k, jk = i, ki = j, and commuting changes the sign of the result.
Is there a better way to make sense of this though? The constant term seems confusing, probably since we're trying to express 4-dimensional concepts in a 3 dimensional world.
tib
Could this also related to the water bottle example where different rotation in the axis results in different final orientation? Is it right to consider i, j, k as different axis?
keenan
It's a lot easier to see the noncommutativity of quaternion multiplication if you use the scalar-vector expression for the product. Recall (from later in the lecture) that if you have quaternions $p = (a,\mathbf{u})$ and $q = (b,\mathbf{v})$ where $a,b \in \mathbb{R}$ and $\mathbf{u},\mathbf{v} \in \mathbb{R}^3$, then
Ah, I jumped a gun on this slide cause I was curious but it appears my question in the previous lecture was addressed. We are discussing quaternions with respect to rotations.
Could anyone explains to me why qp != pq from the formula? I can't see why i.e. b1b2i will differ from b2b1i
@peanut, I don't know if this'll answer your question, but if you look at the equation ijk = -1, depending on how you multiply, you get different results.
For example, ijk = -1 (multiply by k on the right)
ijk^2 = -k
ij(-1) = -k
ij = k
But, ijk = -1 (multiply by ji on the left)
jiijk = ji(-1)
j(-1)jk = ji(-1)
j^2k = ji
-k = ji
ji = -k
@marshmallow Thanks! This explanation is so clear.
The queternion equality makes a lot of sense, especially when you explain it geometrically. Can't imagine how Hamilton must have felt when it all clicked after so many years!
@marshmallow gave a very nice explanation. But I still find it hard to understand it geometrically...
I agree with @Bananya that I understand the math behind this, but I am having a lot of trouble visualizing it.
I suppose it kinda works like the right hand rule and cross products, like if you let i = x, j = y, k = z, then ij = k, jk = i, ki = j, and commuting changes the sign of the result.
Is there a better way to make sense of this though? The constant term seems confusing, probably since we're trying to express 4-dimensional concepts in a 3 dimensional world.
Could this also related to the water bottle example where different rotation in the axis results in different final orientation? Is it right to consider i, j, k as different axis?
It's a lot easier to see the noncommutativity of quaternion multiplication if you use the scalar-vector expression for the product. Recall (from later in the lecture) that if you have quaternions $p = (a,\mathbf{u})$ and $q = (b,\mathbf{v})$ where $a,b \in \mathbb{R}$ and $\mathbf{u},\mathbf{v} \in \mathbb{R}^3$, then
$$pq = (ab - \mathbf{u} \cdot \mathbf{v}, a\mathbf{v} + b\mathbf{u} + \mathbf{u} \times \mathbf{v}).$$
So for instance, if $a = b = 0$ (purely imaginary quaternions) you just get
$$pq = (-\mathbf{u} \cdot \mathbf{v}, \mathbf{u} \times \mathbf{v}).$$
But then
$$qp = (-\mathbf{u} \cdot \mathbf{v}, \mathbf{v} \times \mathbf{u}),$$
and since the cross product is _anti_commutative ($\mathbf{u} \times \mathbf{v}) = -\mathbf{v} \times \mathbf{u})$), the two products are not equal.