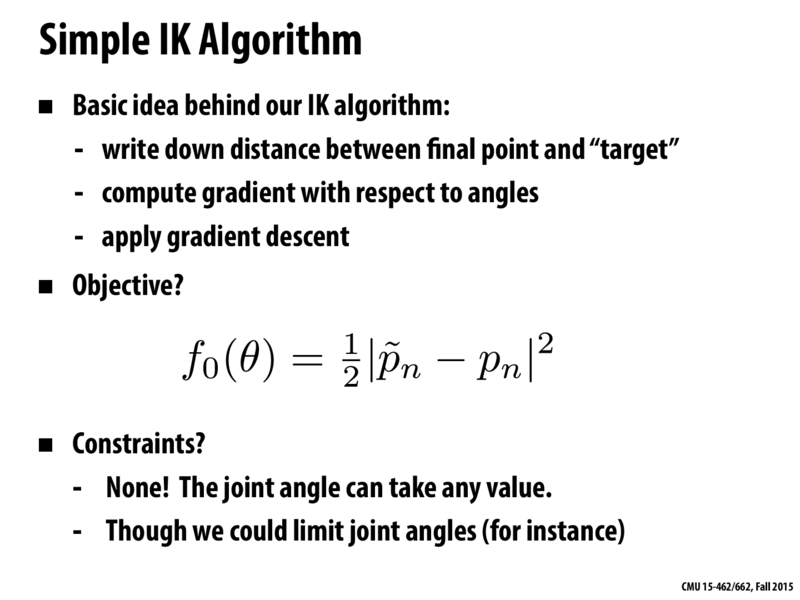
Any particular reason we prefer this objective? Is it just because it's convex and gives good results?
kmcrane
It's not convex, because the positions (p) depend in a nonconvex way on the angles (\theta) (involving sines and cosines). It is however a fairly natural energy: it just says, "how far are we (in the usual Euclidean sense) from meeting our goal?" I.e., how close is the source from the target? There is no one true definition here, though, and it would certaintly be worth experimenting with different objectives for different problems.
kapalani
Are any of the inverse kinematics problems solved analytically rather than numerically in practice? For example a 2 link or a 3 link robot arm has an ugly, yet closed form solution, so is it a case where if we have a closed form solution we use that but if we don't we fall back to the numerical solution?
kmcrane
@kapalani: I suspect that most "real-world" IK problems don't have analytical solutions due to the complexity of real systems, but you're right that having closed-form solutions for simple systems (or even simple components of larger systems) can be useful. One way to see that general IK problems are difficult (and perhaps even impossible) to solve exactly is that many of them boil down to hard problems in algebraic geometry. In general, there are a lot of connections between algebraic geometry and kinematics, path planning, etc., and it is definitely a subject worth studying.
Any particular reason we prefer this objective? Is it just because it's convex and gives good results?
It's not convex, because the positions (p) depend in a nonconvex way on the angles (\theta) (involving sines and cosines). It is however a fairly natural energy: it just says, "how far are we (in the usual Euclidean sense) from meeting our goal?" I.e., how close is the source from the target? There is no one true definition here, though, and it would certaintly be worth experimenting with different objectives for different problems.
Are any of the inverse kinematics problems solved analytically rather than numerically in practice? For example a 2 link or a 3 link robot arm has an ugly, yet closed form solution, so is it a case where if we have a closed form solution we use that but if we don't we fall back to the numerical solution?
@kapalani: I suspect that most "real-world" IK problems don't have analytical solutions due to the complexity of real systems, but you're right that having closed-form solutions for simple systems (or even simple components of larger systems) can be useful. One way to see that general IK problems are difficult (and perhaps even impossible) to solve exactly is that many of them boil down to hard problems in algebraic geometry. In general, there are a lot of connections between algebraic geometry and kinematics, path planning, etc., and it is definitely a subject worth studying.