On that note, what exactly is the moment of inertia?
Also (sorry for spamming this channel), but why does:
$$
\frac{d}{dt}\frac{\partial \mathcal{L}}{\partial \dot{q}} = \frac{d}{dt}\left(mL^{2}\dot{\theta}\right)
= \frac{\partial L}{\partial q} = -mgL\sin(\theta)
$$
Sigh, I give up on the latex: I'm confused as to why differentiating the Lagrangian partial in $\dot{q}$ with respect to velocity gives us the Lagrangian partial with respect to time? Not seeing how the algebra works here.
kmcrane
Yes, $I$ is the moment of inertia; the Wikipedia page gives a pretty good description.
In your second question, I think you're seeing an "equals" sign between the second and third expression; there isn't one! Just bad slide layout. :-)
dvernet
Hi, thanks I'll check out the Wikipedia page. For the second question, am I incorrect in interpreting:
I'm sorry, no, you're absolutely right. I mis-read your question because I was trying to parse the TeX "by eye." :-)
What you have written in your most recent comment is the Euler-Lagrange equation associated with the Lagrangian $\mathcal{L}$. Explaining why this is true is beyond the scope of the course. But here's some simple intuition: suppose the potential $U$ depends only on the configuration $q$, and suppose the kinetic energy depends only on the velocity $\dot{q}$. Then on the right hand side you're taking the derivative of the potential with respect to the position; that is precisely the force $F$. On the left, you're taking the derivative of something that morally looks like $\tfrac{1}{2}mv^2$ first with respect to $v$ and then with respect to time, yielding $ma$. So, in the end, this equation basically says $F = ma$. (Why bother, you might ask? Because it also gives you the right equations of motion when things are not quite so simple!)
It seems that taking the derivate of $ \dot \theta $ with respect to $\theta$ is zero, and vice versa. Why is that the case?
kmcrane
@pavelkang: It's because these are partial derivatives, rather than total derivatives. From this perspective, $\theta$ and $\dot{\theta}$ are different variables. This is perhaps a confusing statement given that the symbols "$q$" and "$\dot{q}$" both include the symbol "$q$." But suppose we had called "$\dot{q}$" something else, like "$v$". Then it would be clear $v$ is a function of $q$; in particular:
Even though this is a rather funky function, it's still a function, not really any different from some simpler function like $f(q) = q^2$ or $f(q) = \exp(q)$.
Ok, so what's the difference between the total derivative and the partial derivative? The former takes "indirect dependencies" into account, whereas the latter does not. I.e., if we have a function $F(q,v(q))$ then
but $\partial F/\partial v$ is just $\partial F/\partial v$.
Another way of saying this is:
the partial derivative is the variation of one of the arguments to a function (keeping all other arguments fixed), whereas
the total derivative is the variation of some quantity, which could possibly influence more than one of the arguments to a given function.
Intuitively, the former says something about the "shape of the function" (independent of which inputs you plug in), whereas the latter says something about how the function varies for a particular set of arguments.
Not sure if any of these explanations help! But hopefully that starts to give you a sense of the difference.
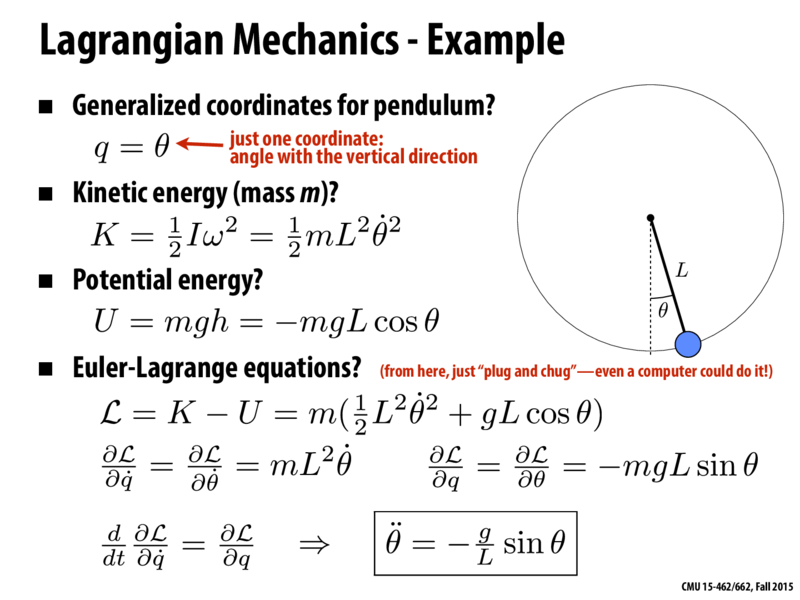
$I$ here is the moment of inertia, correct?
On that note, what exactly is the moment of inertia?
Also (sorry for spamming this channel), but why does: $$ \frac{d}{dt}\frac{\partial \mathcal{L}}{\partial \dot{q}} = \frac{d}{dt}\left(mL^{2}\dot{\theta}\right) = \frac{\partial L}{\partial q} = -mgL\sin(\theta) $$ Sigh, I give up on the latex: I'm confused as to why differentiating the Lagrangian partial in $\dot{q}$ with respect to velocity gives us the Lagrangian partial with respect to time? Not seeing how the algebra works here.
Yes, $I$ is the moment of inertia; the Wikipedia page gives a pretty good description.
In your second question, I think you're seeing an "equals" sign between the second and third expression; there isn't one! Just bad slide layout. :-)
Hi, thanks I'll check out the Wikipedia page. For the second question, am I incorrect in interpreting:
$$ \frac{d}{dt}\frac{\partial \mathcal{L}}{\partial \dot{q}} = \frac{\partial \mathcal{L}}{\partial q} $$
as being equal?
I'm sorry, no, you're absolutely right. I mis-read your question because I was trying to parse the TeX "by eye." :-)
What you have written in your most recent comment is the Euler-Lagrange equation associated with the Lagrangian $\mathcal{L}$. Explaining why this is true is beyond the scope of the course. But here's some simple intuition: suppose the potential $U$ depends only on the configuration $q$, and suppose the kinetic energy depends only on the velocity $\dot{q}$. Then on the right hand side you're taking the derivative of the potential with respect to the position; that is precisely the force $F$. On the left, you're taking the derivative of something that morally looks like $\tfrac{1}{2}mv^2$ first with respect to $v$ and then with respect to time, yielding $ma$. So, in the end, this equation basically says $F = ma$. (Why bother, you might ask? Because it also gives you the right equations of motion when things are not quite so simple!)
If you want to read more there is again the Wikipedia page on Lagrangian mechanics; a terrific book is The Variational Principles of Mechanics (though it takes some dedication!).
It seems that taking the derivate of $ \dot \theta $ with respect to $\theta$ is zero, and vice versa. Why is that the case?
@pavelkang: It's because these are partial derivatives, rather than total derivatives. From this perspective, $\theta$ and $\dot{\theta}$ are different variables. This is perhaps a confusing statement given that the symbols "$q$" and "$\dot{q}$" both include the symbol "$q$." But suppose we had called "$\dot{q}$" something else, like "$v$". Then it would be clear $v$ is a function of $q$; in particular:
$$(v(q))(t) := \lim_{\tau \to 0} \frac{q(t+\tau)-q(t)}{\tau}.$$
Even though this is a rather funky function, it's still a function, not really any different from some simpler function like $f(q) = q^2$ or $f(q) = \exp(q)$.
Ok, so what's the difference between the total derivative and the partial derivative? The former takes "indirect dependencies" into account, whereas the latter does not. I.e., if we have a function $F(q,v(q))$ then
$$ \frac{dF}{dq} = \frac{\partial F}{\partial q} + \frac{\partial F}{\partial v}\frac{dv}{dq} $$
but $\partial F/\partial v$ is just $\partial F/\partial v$.
Another way of saying this is:
Intuitively, the former says something about the "shape of the function" (independent of which inputs you plug in), whereas the latter says something about how the function varies for a particular set of arguments.
Not sure if any of these explanations help! But hopefully that starts to give you a sense of the difference.
Now what I haven't answered is: why do the Euler-Lagrange equations involve partial derivatives (rather than, say, total derivatives) with respect to $q$ and $\dot{q}$. The answer involves deriving these equations from Hamilton's principle, which you can find on the Wikipedia page. A very nice and (much) more detailed discussion can be found in the book "Variational Principles of Mechanics" by Lanczos.