Why do we call it "forward" kinematics in this case?
outousan
Perhaps because we compute each joint's configuration from top of the hierarchy to the bottom while carrying effects over from above to below?
Fjorge
@RakTheCroc maybe simply to differentiate it from inverse kinematics?
WJM
I can see how the constraint definitions themselves can add to the realism of the animation. Like how you can normally rotate your arm so far easily yourself, but a large amount of external force could bend the arm a bit further, and eventually break it. Essentially, having some of the "constraints" on the ranges not being simple 'hard cutoffs.'
More intuition about forward and inverse kinematics.
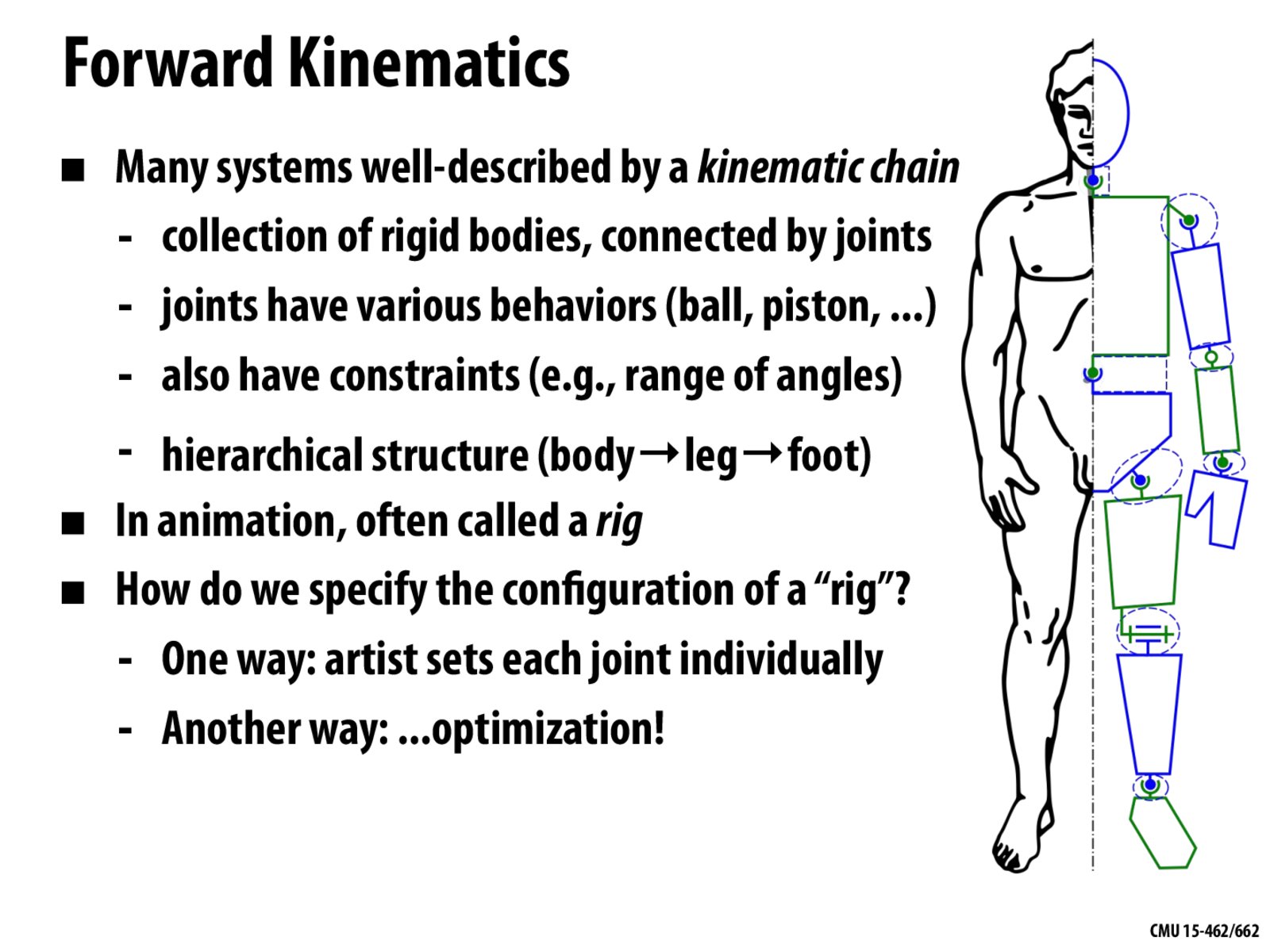
Forward Kinematics
(angles to position)
What you are given:
The length of each link
The angle of each joint
What you can find:
The position of any point
(i.e. it’s (x, y, z) coordinates)
Inverse Kinematics
(position to angles)
What you are given:
The length of each link
The position of some point on the robot
What you can find:
The angles of each joint needed to
obtain that position
Why do we call it "forward" kinematics in this case?
Perhaps because we compute each joint's configuration from top of the hierarchy to the bottom while carrying effects over from above to below?
@RakTheCroc maybe simply to differentiate it from inverse kinematics?
I can see how the constraint definitions themselves can add to the realism of the animation. Like how you can normally rotate your arm so far easily yourself, but a large amount of external force could bend the arm a bit further, and eventually break it. Essentially, having some of the "constraints" on the ranges not being simple 'hard cutoffs.'
https://www.cs.cmu.edu/~16311/current/schedule/ppp/Lec17-FK.pdf
More intuition about forward and inverse kinematics.
Forward Kinematics (angles to position) What you are given: The length of each link The angle of each joint What you can find: The position of any point (i.e. it’s (x, y, z) coordinates)
Inverse Kinematics (position to angles) What you are given: The length of each link The position of some point on the robot What you can find: The angles of each joint needed to obtain that position
Are we able to use a combination of IK and FK?