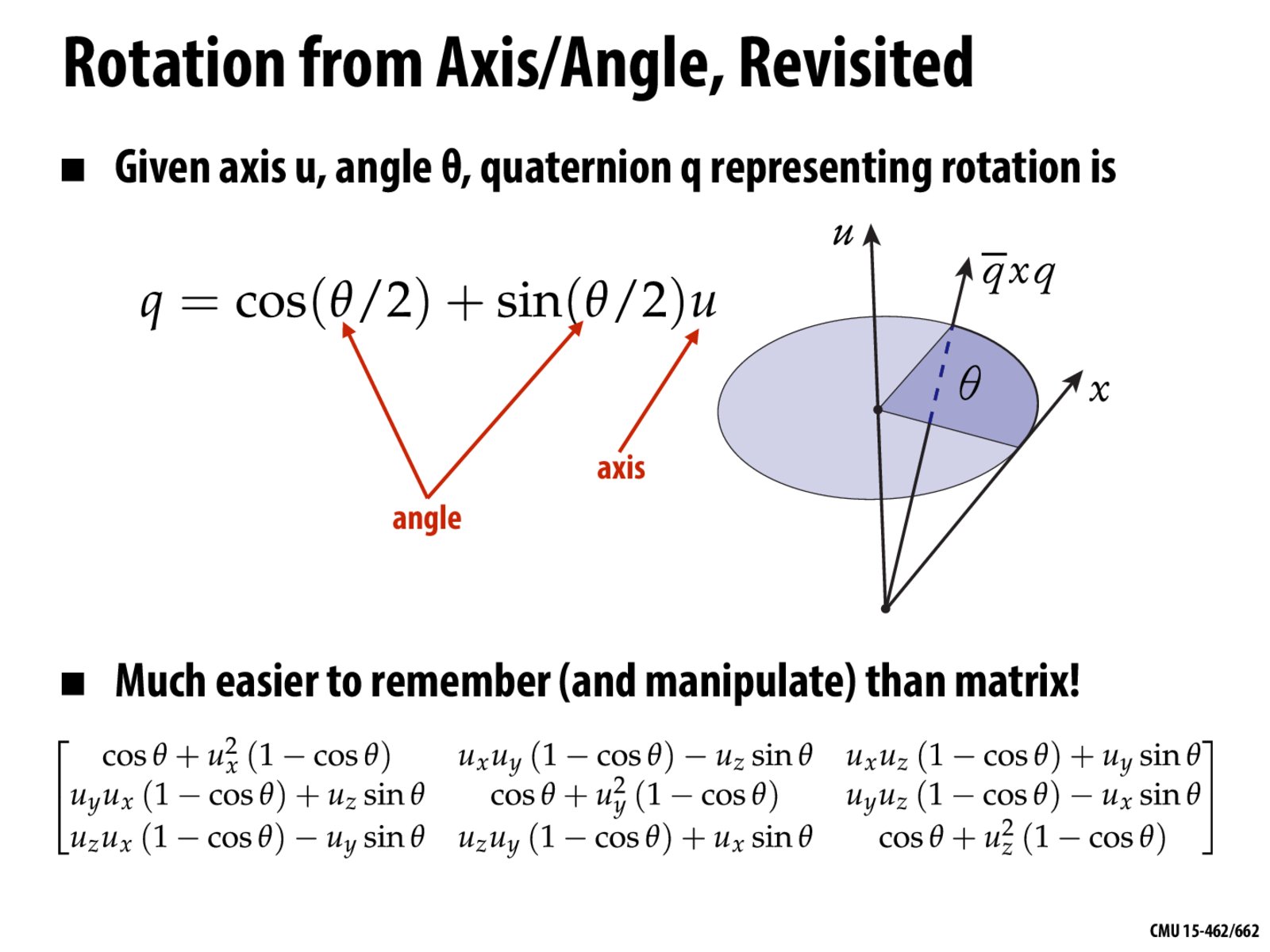
Why does \bar q * x * q yield the same result as the rotation matrix? I didn't quite understand that part.
Ace
Why is the angle divided by 2 when given to each of the cosine and sine functions?
Senbei
Looking at this series of explorable videos: https://eater.net/quaternions.
They help a lot to understand the match between a quaternions and the rotation information it encodes.
Yet I still can't quite understand the more in-depth reason why the quaternions encodes such rotation information.
justaddwater
I'm also confused about how \bar q * x * q show the rotation as well. I'm not sure how it makes sense why we need \bar q, wouldn't that undo q or something like that? I will check out the video series to better understand this.
Why does \bar q * x * q yield the same result as the rotation matrix? I didn't quite understand that part.
Why is the angle divided by 2 when given to each of the cosine and sine functions?
Looking at this series of explorable videos: https://eater.net/quaternions.
They help a lot to understand the match between a quaternions and the rotation information it encodes.
Yet I still can't quite understand the more in-depth reason why the quaternions encodes such rotation information.
I'm also confused about how \bar q * x * q show the rotation as well. I'm not sure how it makes sense why we need \bar q, wouldn't that undo q or something like that? I will check out the video series to better understand this.