The noise is so similar to the digital cameras under dark scene.
wmarango
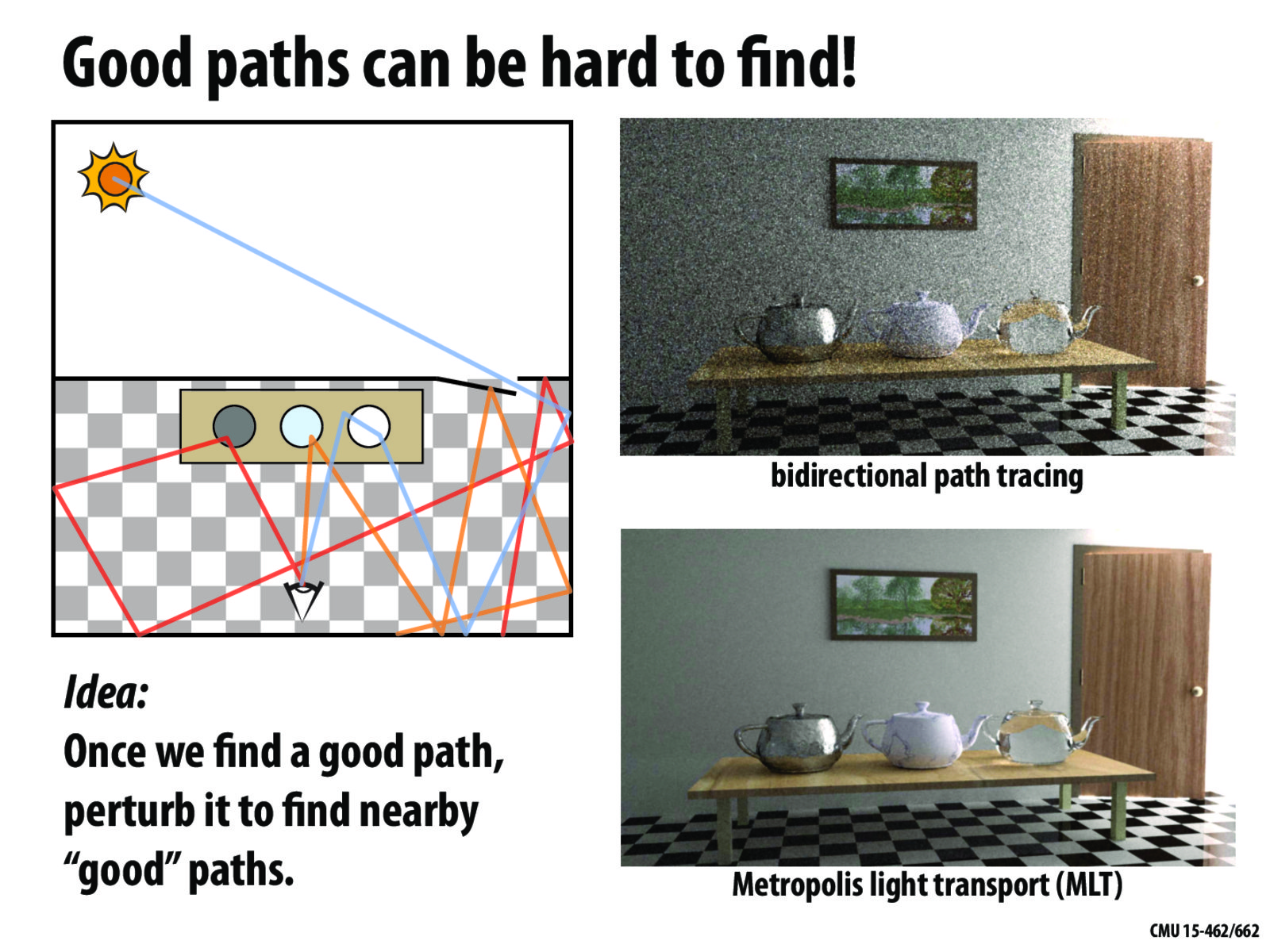
I'm curious how commercial rendering engines get around cases like this. Even with the strategies discussed in the past few lectures, the images produced still have significantly more noise than photorealistic renders one might find online.
tianez
How can we tell if we are purturbing in a way that doesn't introduce bad "preferences"?
kkzhang
How do we know that we've found a "good path"? How do we assess the goodness of the nearby paths?
viceversa
Could the noise be viewed as an undersample here?
dl123
Does that implies that the good paths are all nearby? What's the intuition behind it?
Concurrensee
Is there any fast approach to find a good path?
large_monkey
What kind of optimizations are used by the current state of the art solutions in getting around this? Do they use some sort of notion to quantify how good a path is?
David
Is there a definition we can use to algorithmically define a good path?
ant123
What defines a "good path." Also, is there a less computationally expensive way to find the first "good path?"
The noise is so similar to the digital cameras under dark scene.
I'm curious how commercial rendering engines get around cases like this. Even with the strategies discussed in the past few lectures, the images produced still have significantly more noise than photorealistic renders one might find online.
How can we tell if we are purturbing in a way that doesn't introduce bad "preferences"?
How do we know that we've found a "good path"? How do we assess the goodness of the nearby paths?
Could the noise be viewed as an undersample here?
Does that implies that the good paths are all nearby? What's the intuition behind it?
Is there any fast approach to find a good path?
What kind of optimizations are used by the current state of the art solutions in getting around this? Do they use some sort of notion to quantify how good a path is?
Is there a definition we can use to algorithmically define a good path?
What defines a "good path." Also, is there a less computationally expensive way to find the first "good path?"