It seems that shear operation requires the most computation. It is also the least commonly used one in practice?
niyiqiul
After seeing the whole video, I now think that shear should be the most common one because we need to represent a translate operation as a shear operation in homogeneous coordinates.
anon
Would any, for example, six-faced, twelve-edged, eight-cornered polyhedron then be a shear of a cube? Or are there certain shapes with those properties that a cube cannot be morphed into?
Dalyons
I'm having a little trouble visualizing this. What scene/image would be a good example where a shear is necessary (besides for translation)?
ScreenTime
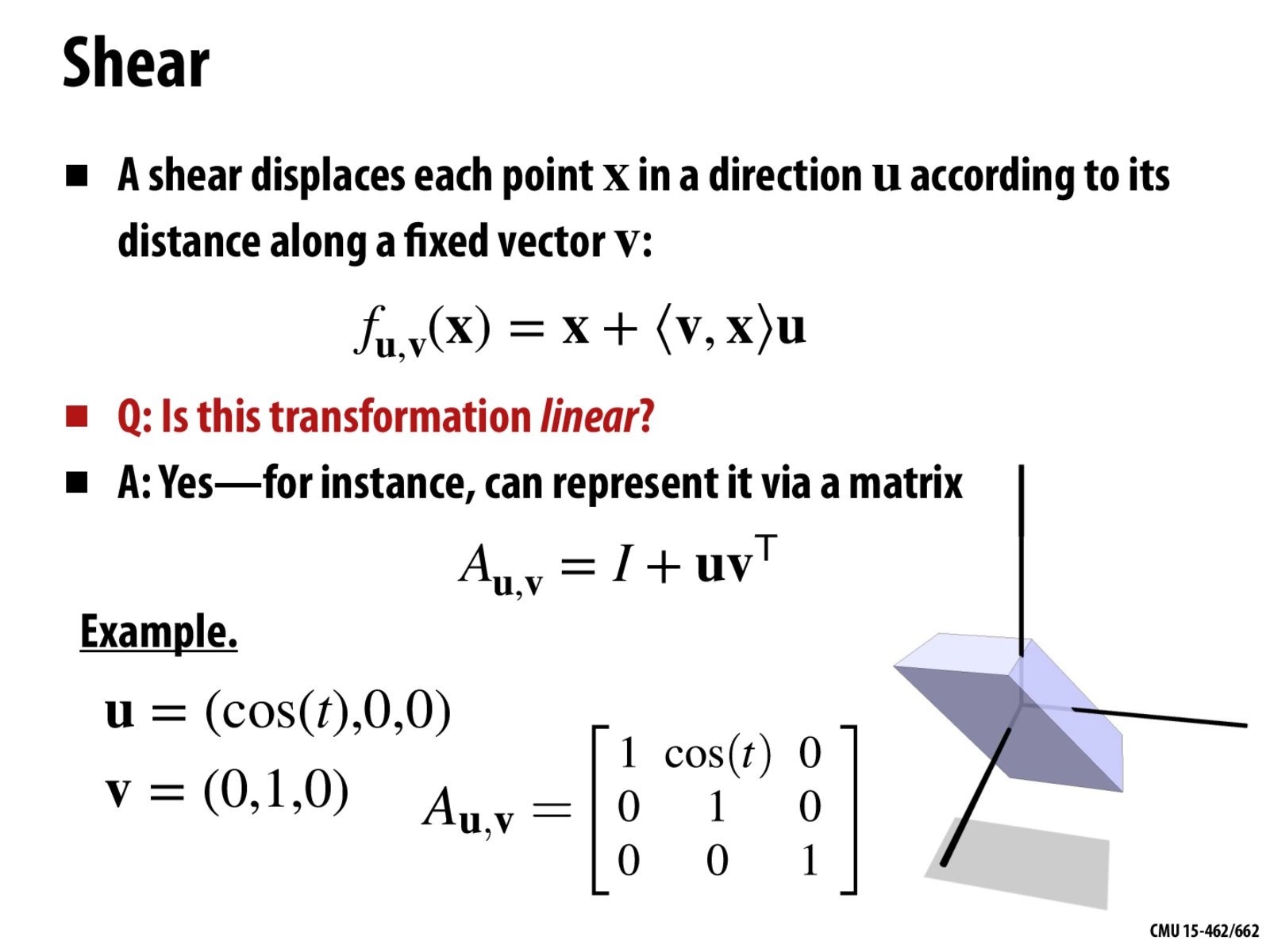
How did uv^T come out to be ((0, cos(t),0),(0,0,0),(0,0,0))
Coyote
Shear seems similar to nonuniform scaling, is is possible to just interchange the two as shear seems more resource heavy in terms of computation?
Joshua
how to know which element other than diagonal in matrix decide which direction of shear?
BlueCat
Can we have a visualization on how each point changes due to shearing? I could not visualize it through pure matrix or through the whole motion.
David
I am also confused with how exactly the factor cost is influencing the extent of shearing
spookyspider
I also am confused about, what is the difference between shear and nonuniform scaling?
siamese
Are there any other kinds of transformations that are shearing, scaling etc. that can be represented by linear transformations?
It seems that shear operation requires the most computation. It is also the least commonly used one in practice?
After seeing the whole video, I now think that shear should be the most common one because we need to represent a translate operation as a shear operation in homogeneous coordinates.
Would any, for example, six-faced, twelve-edged, eight-cornered polyhedron then be a shear of a cube? Or are there certain shapes with those properties that a cube cannot be morphed into?
I'm having a little trouble visualizing this. What scene/image would be a good example where a shear is necessary (besides for translation)?
How did uv^T come out to be ((0, cos(t),0),(0,0,0),(0,0,0))
Shear seems similar to nonuniform scaling, is is possible to just interchange the two as shear seems more resource heavy in terms of computation?
how to know which element other than diagonal in matrix decide which direction of shear?
Can we have a visualization on how each point changes due to shearing? I could not visualize it through pure matrix or through the whole motion.
I am also confused with how exactly the factor cost is influencing the extent of shearing
I also am confused about, what is the difference between shear and nonuniform scaling?
Are there any other kinds of transformations that are shearing, scaling etc. that can be represented by linear transformations?