We note that this is pretty good despite its assumptions - can we do better by predicting the distribution of the rays somehow?
dchen2
How often do we encounter convex objects? Can we circumvent the convexity assumption by modeling a concave shape as the difference of convex shapes?
sm022
Are there certain applications where we want to use a specific, different type of heuristic? If so, what are some examples of those cases and the different heuristics used?
daria
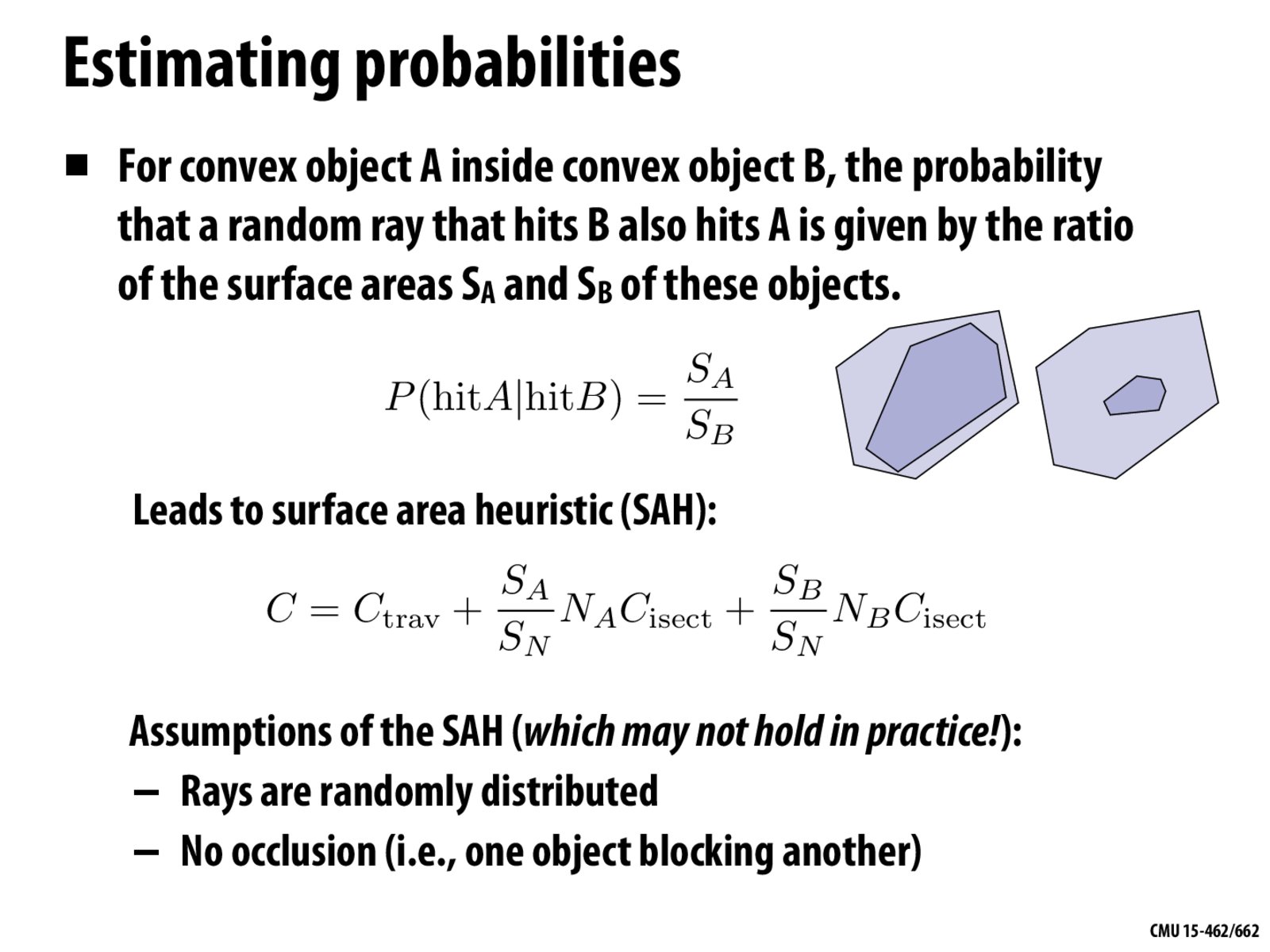
I assume SN is the surface are of the parent and SA is the surface area of one of the children?
richardnnn
Why this estimate does not apply to the non-convex cases?
jonasjiang
If A is not convex, what will be the consequence of using this heuristic? It seems just the same as the convex condition.
Joshua
Is it a good way to try to find a convex primitive or partition the primitive to convex shape that helps this method?
minhsual
How can we estimate the probabilities when the assumptions do not hold in practice?
twizzler
What other heuristics are there when modeling intersection probability when you have occlusion. I see that it doesn't make sense to assume that you will have a strange ray distribution, but occluding objects occur pretty often from what I understand.
coolpotato
How would you compute these probabilities if there is occlusion? Occlusion seems to occur quite often in the real world.
David
This formula seems pretty general. Why is it only for convex polygons?
kurt
Can this be applied to non-convex polygons by doing some transformations?
TejasFX
Does the polygon being convex really matter? Additionally, if we were to remove the uniform ray distribution assumption and use some other distribution for the rays, would that lead to a noticeable different in actual runtime?
Bellala
Does this work on all geometries? Is there a general computation for them?
anag
If A is totally inside B, why does the convex part need to hold?
We note that this is pretty good despite its assumptions - can we do better by predicting the distribution of the rays somehow?
How often do we encounter convex objects? Can we circumvent the convexity assumption by modeling a concave shape as the difference of convex shapes?
Are there certain applications where we want to use a specific, different type of heuristic? If so, what are some examples of those cases and the different heuristics used?
I assume SN is the surface are of the parent and SA is the surface area of one of the children?
Why this estimate does not apply to the non-convex cases?
If A is not convex, what will be the consequence of using this heuristic? It seems just the same as the convex condition.
Is it a good way to try to find a convex primitive or partition the primitive to convex shape that helps this method?
How can we estimate the probabilities when the assumptions do not hold in practice?
What other heuristics are there when modeling intersection probability when you have occlusion. I see that it doesn't make sense to assume that you will have a strange ray distribution, but occluding objects occur pretty often from what I understand.
How would you compute these probabilities if there is occlusion? Occlusion seems to occur quite often in the real world.
This formula seems pretty general. Why is it only for convex polygons?
Can this be applied to non-convex polygons by doing some transformations?
Does the polygon being convex really matter? Additionally, if we were to remove the uniform ray distribution assumption and use some other distribution for the rays, would that lead to a noticeable different in actual runtime?
Does this work on all geometries? Is there a general computation for them?
If A is totally inside B, why does the convex part need to hold?