There are three possible x that might give the minimum error: the two original vertexes, and the x computed by optimizing the quadratic function, is that right?
spookyspider
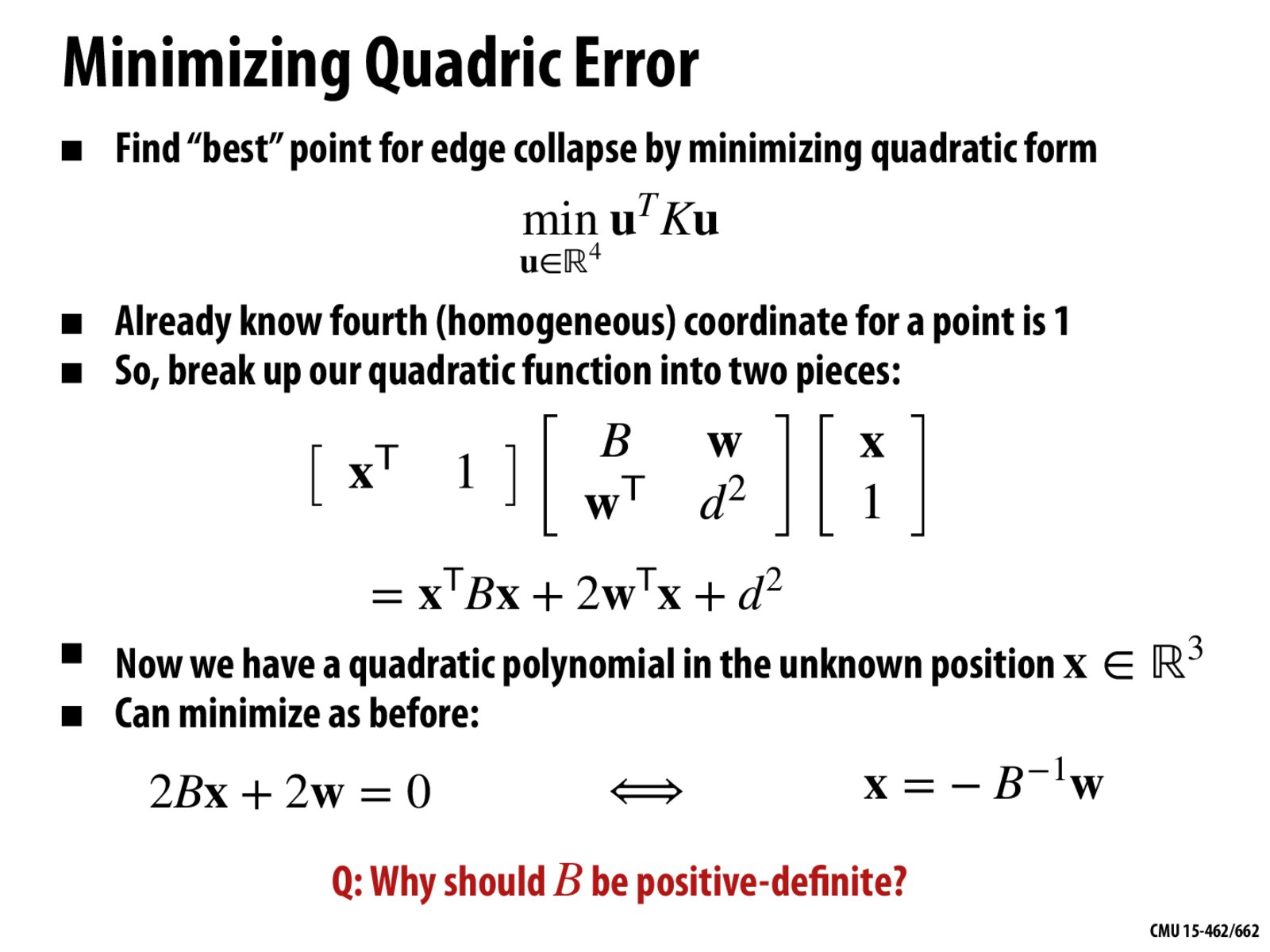
I feel like I'm missing something from the question, is B a matrix of constants kind of like A on the last slide? Then, how could we know if it's positive definite if we don't know what the constants are? Maybe I'm completely misunderstanding this haha
gloose
Why are we calling the bottom right element of the matrix "d^2"? What is the meaning of d?
Dalyons
I'm a bit confused here on how we went from the last part to this one. What's the difference between this calculation and the last one? Did we just add a homogeneous coordinate?
aa4
Since the matrix K is obtained from (vv^T), it is going to be always positive-definite.
Oh_skr
Let y = [a b c], then B = y^Ty. For any nonzero vector z in R3, we have z^TBz = z^T(y^Ty)z = ||yz||^2 > 0, hence B is always positive-definite.
There are three possible x that might give the minimum error: the two original vertexes, and the x computed by optimizing the quadratic function, is that right?
I feel like I'm missing something from the question, is B a matrix of constants kind of like A on the last slide? Then, how could we know if it's positive definite if we don't know what the constants are? Maybe I'm completely misunderstanding this haha
Why are we calling the bottom right element of the matrix "d^2"? What is the meaning of d?
I'm a bit confused here on how we went from the last part to this one. What's the difference between this calculation and the last one? Did we just add a homogeneous coordinate?
Since the matrix K is obtained from (vv^T), it is going to be always positive-definite.
Let y = [a b c], then B = y^Ty. For any nonzero vector z in R3, we have z^TBz = z^T(y^Ty)z = ||yz||^2 > 0, hence B is always positive-definite.
I got confused about where B and w comes from.