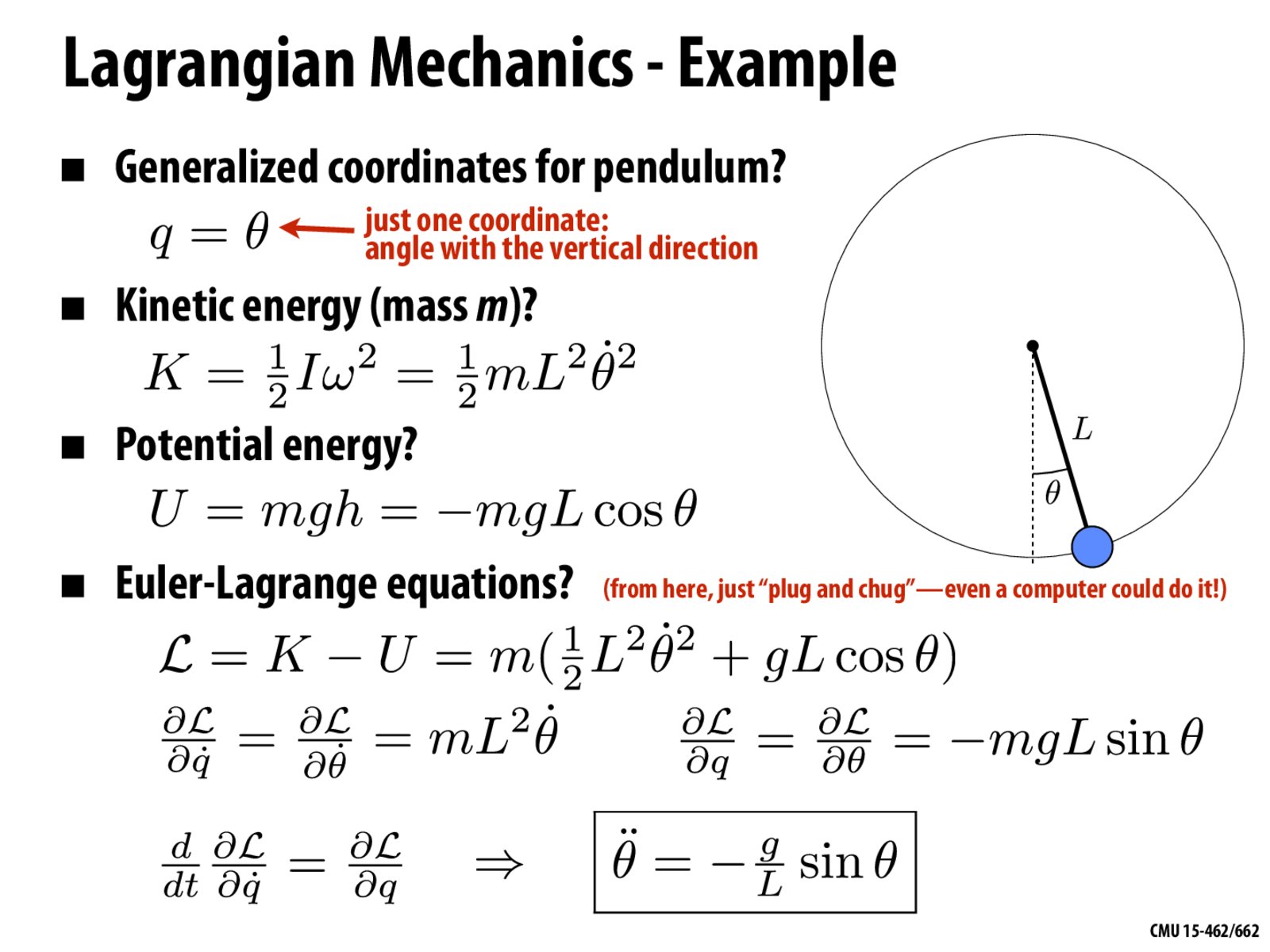
For the dL/dq equation, are we treating the m/2 L^2 (theta dot)^2 term as constant because we're only differentiating with respect to theta?
jonasjiang
How can these equations be generalized to an arbitrary rotation system?
MrRockefeller
I think as long as the pendulum only has accelaration parallel to velocity, it doesn't matter which rotation orientation it is at...
Coyote
If we were to use Euler-Lagrange equations on more complex objects, would we need to change something about the moment of inertia? I vaguely recall shapes in 3D having more complex moments.
BlueCat
When we calculate U, this is the process for finding the force which points to the ground right?
air54321
How can we translate this for systems that do not follow pendulum motion?
For the dL/dq equation, are we treating the m/2 L^2 (theta dot)^2 term as constant because we're only differentiating with respect to theta?
How can these equations be generalized to an arbitrary rotation system?
I think as long as the pendulum only has accelaration parallel to velocity, it doesn't matter which rotation orientation it is at...
If we were to use Euler-Lagrange equations on more complex objects, would we need to change something about the moment of inertia? I vaguely recall shapes in 3D having more complex moments.
When we calculate U, this is the process for finding the force which points to the ground right?
How can we translate this for systems that do not follow pendulum motion?