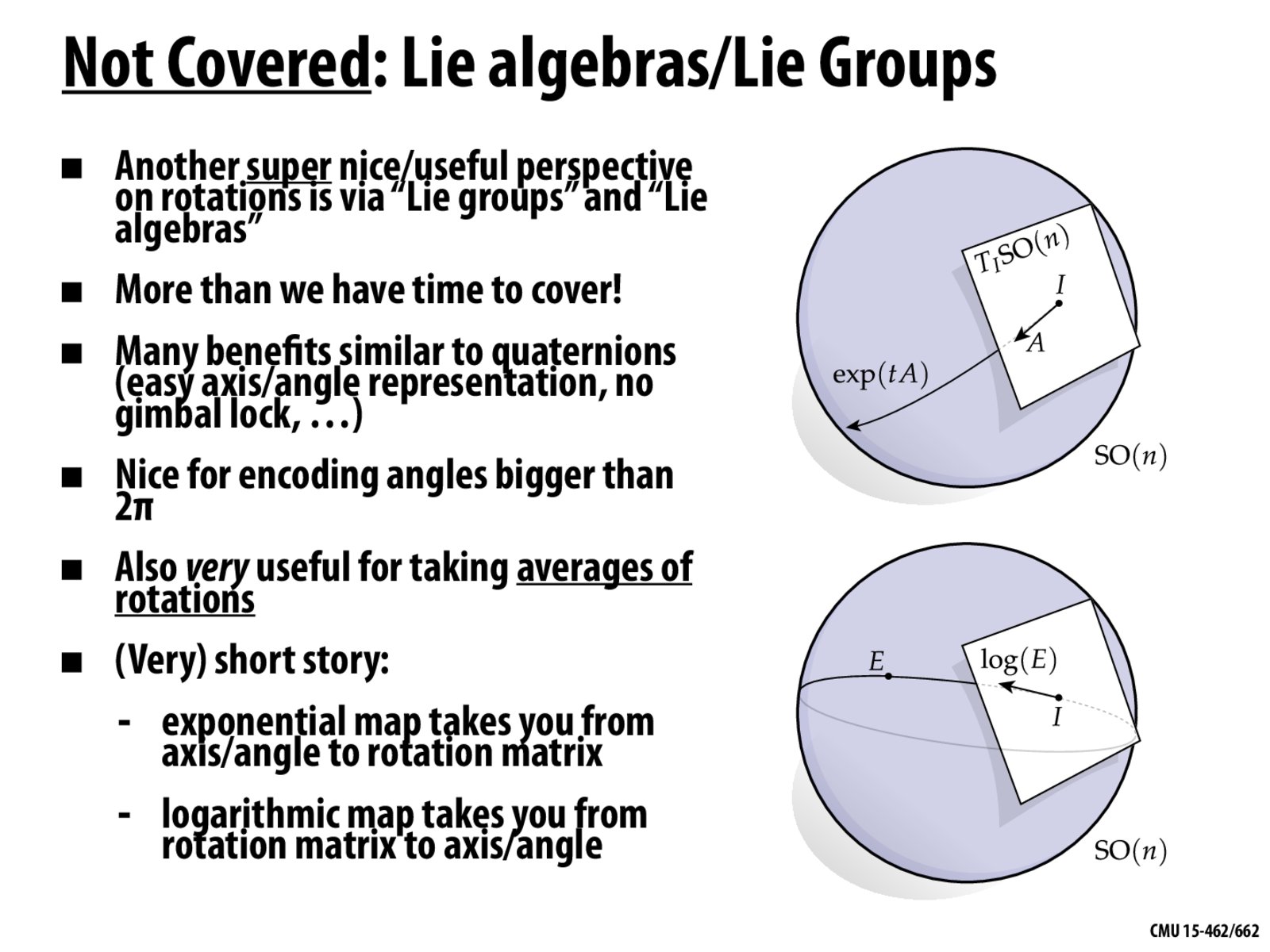
For quaternions how do we show angles greater than 2pi?
anag
Why would we necessarily want to encode angles larger than 2pi? Like when would we rely on a rotation that can't be done by some modulo operations over the unit circle?
rbm
Agree with above - would keeping track of rot's > 2pi be useful for keeping track of rotations over time? Maybe some issue with precision/overflow?
anon
I think we might want angles larger than 2pi because of the difference in the visual representation process? Like a point rotating 3pi over the center of a sphere travels much more distance than if it rotated just pi, even if the ending location is the same.
Also, can you elaborate on where we would want to take the averages of rotations?
large_monkey
Along the same lines as the other questions, it's unclear to me exactly why angles greater than 2 pi can't be handled through other means discussed (quaternions, etc). The slide mentions that Lie algebras are "nice" for these large rotations though, so even though we won't have time to cover this topic, what's a brief, intuitive reason as to why this is the case?
For quaternions how do we show angles greater than 2pi?
Why would we necessarily want to encode angles larger than 2pi? Like when would we rely on a rotation that can't be done by some modulo operations over the unit circle?
Agree with above - would keeping track of rot's > 2pi be useful for keeping track of rotations over time? Maybe some issue with precision/overflow?
I think we might want angles larger than 2pi because of the difference in the visual representation process? Like a point rotating 3pi over the center of a sphere travels much more distance than if it rotated just pi, even if the ending location is the same.
Also, can you elaborate on where we would want to take the averages of rotations?
Along the same lines as the other questions, it's unclear to me exactly why angles greater than 2 pi can't be handled through other means discussed (quaternions, etc). The slide mentions that Lie algebras are "nice" for these large rotations though, so even though we won't have time to cover this topic, what's a brief, intuitive reason as to why this is the case?