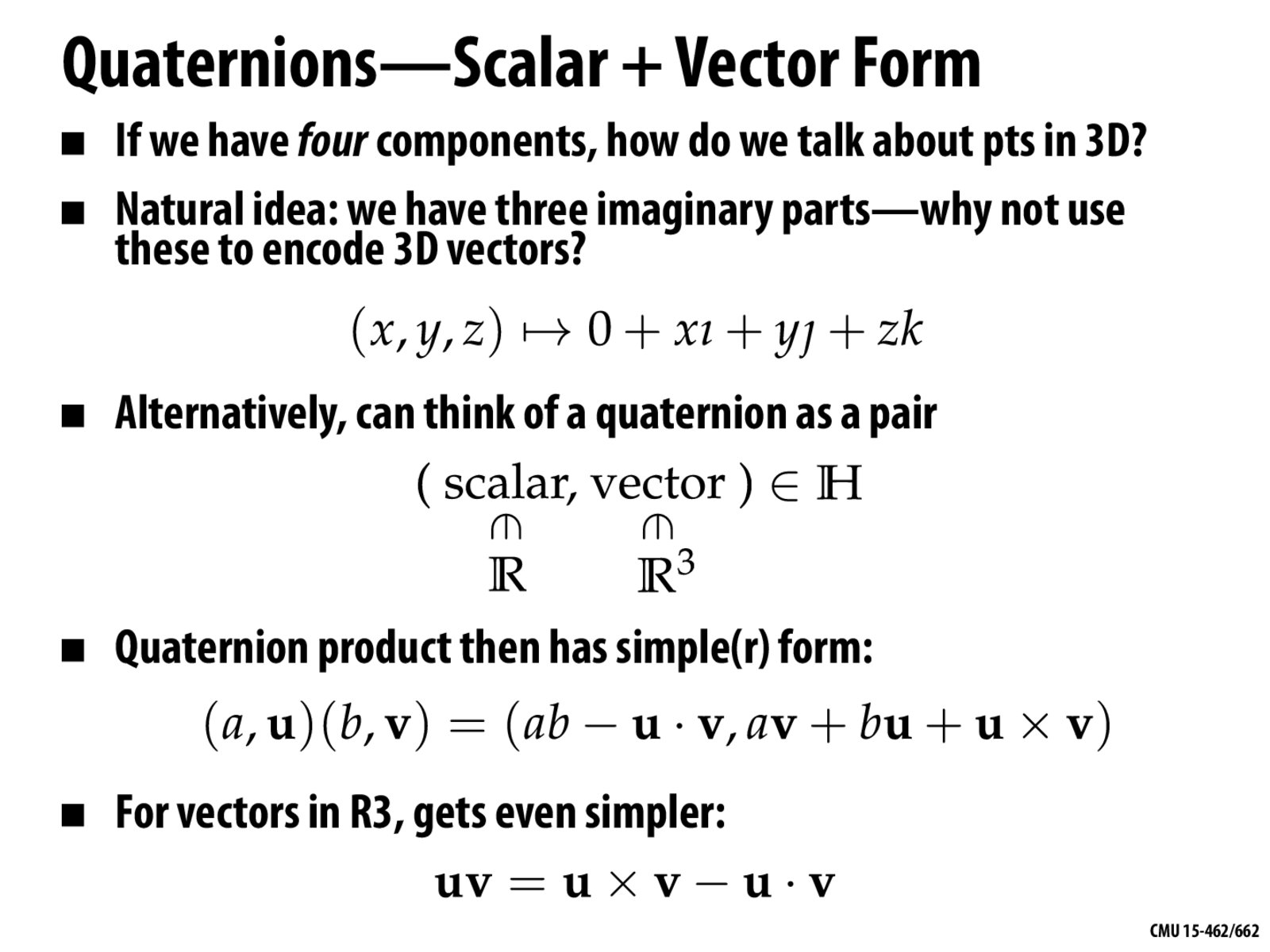
Is the last equation on this slide dimensionally correct? On the RHS, $u.v$ is a scalar and $u \times v$ is a vector.
kkzhang
What happens to the "scalar" component in R3? Is the scalar component only used in rotations? What changes as we increase the value of the scalar component while keeping the vector components constant?
Midoriya
The last equation is dimensionally correct because quaternions are summations of scalars (real parts) and vectors (imaginary parts), as shown in the first equation of this slide.
asheng2
How did we derive the simpler form of the Quarernion product? It's not clear how/if things are distributing
dab
How did we get the first part of the product (ab - u.v)?
fzeng
The simpler form of the quaternion product feels unintuitive, as we have both scalars and vectors within the parenthesis. Could you elaborate on this?
gfkang
Maybe I missed this, but what exactly is the first coordinate for? How does it help us encode rotations?
WhaleVomit
I'm also confused about what the first coordinate represents intuitively. In particular, why can it be thought of as a scalar while ijk can be thought of as a vector?
Dalyons
If the three imaginary components encode a real vector, what's the point of working with complex numbers?
bunnybun99
For the third equation on this page, I don't understand where does the u dot v in the scalar component come from.
TejasFX
When we encode a 3D vector in our quaternary encoding, what does the the scalar part of the scalar-vector form represent, intuitively and/or geometrically?
twizzler
One can see intuitively that this is much nicer than using rotation matrices and the like, but how much of a speedup does using quaternions actually create over matrices. Has there ever been a study which quantified it?
jonasjiang
Is it possible to express the scalar+vector form in 3D geometry? Does it behave similarly to the homogeneous coord?
derk
Confused about where the dot product in the simpler quaternion product form is coming from. Could this be elaborated on / is there an intuitive explanation?
coolpotato
Based on the last formula on this slide, if we were to write code to compute the quaternion products of 3D vectors, we would not need to implement anything related to the quaternion basis (I don't even know how we could even do this). We can simply just compute the last formula?
anag
Is there a derivation for this? Not sure I understand how we'd arrive at this formula.
bobzhangyc
I feel confused how it is represented in 3D
Coyote
What is happening in the third equation? I have no idea how we went from (a, u)*(b, v) to the final expression.
Is the last equation on this slide dimensionally correct? On the RHS, $u.v$ is a scalar and $u \times v$ is a vector.
What happens to the "scalar" component in R3? Is the scalar component only used in rotations? What changes as we increase the value of the scalar component while keeping the vector components constant?
The last equation is dimensionally correct because quaternions are summations of scalars (real parts) and vectors (imaginary parts), as shown in the first equation of this slide.
How did we derive the simpler form of the Quarernion product? It's not clear how/if things are distributing
How did we get the first part of the product (ab - u.v)?
The simpler form of the quaternion product feels unintuitive, as we have both scalars and vectors within the parenthesis. Could you elaborate on this?
Maybe I missed this, but what exactly is the first coordinate for? How does it help us encode rotations?
I'm also confused about what the first coordinate represents intuitively. In particular, why can it be thought of as a scalar while ijk can be thought of as a vector?
If the three imaginary components encode a real vector, what's the point of working with complex numbers?
For the third equation on this page, I don't understand where does the u dot v in the scalar component come from.
When we encode a 3D vector in our quaternary encoding, what does the the scalar part of the scalar-vector form represent, intuitively and/or geometrically?
One can see intuitively that this is much nicer than using rotation matrices and the like, but how much of a speedup does using quaternions actually create over matrices. Has there ever been a study which quantified it?
Is it possible to express the scalar+vector form in 3D geometry? Does it behave similarly to the homogeneous coord?
Confused about where the dot product in the simpler quaternion product form is coming from. Could this be elaborated on / is there an intuitive explanation?
Based on the last formula on this slide, if we were to write code to compute the quaternion products of 3D vectors, we would not need to implement anything related to the quaternion basis (I don't even know how we could even do this). We can simply just compute the last formula?
Is there a derivation for this? Not sure I understand how we'd arrive at this formula.
I feel confused how it is represented in 3D
What is happening in the third equation? I have no idea how we went from (a, u)*(b, v) to the final expression.