In quaternions, what is the real number (a) affecting? My intuition is the i, j, k values are mapping relative 3d axis in a way (although I might be wrong), but I'm having trouble seeing where the real number affects the rotation.
blahaj
Is there a similar concept for higher dimensions? Eg. if we wanted to rotate a hypothetical 4D object, are there 2^3 - 1 = 7 imaginary coordinates?
dchen2
Trying to imagine i, j, and k as actions onto the plane, it seems like multiplying by any one of them will rotate about some specific axis, sort of like Euler angles. If so, how can one make sense of ijk = -1? Also, what would it mean to "rotate" by i + j?
niyiqiul
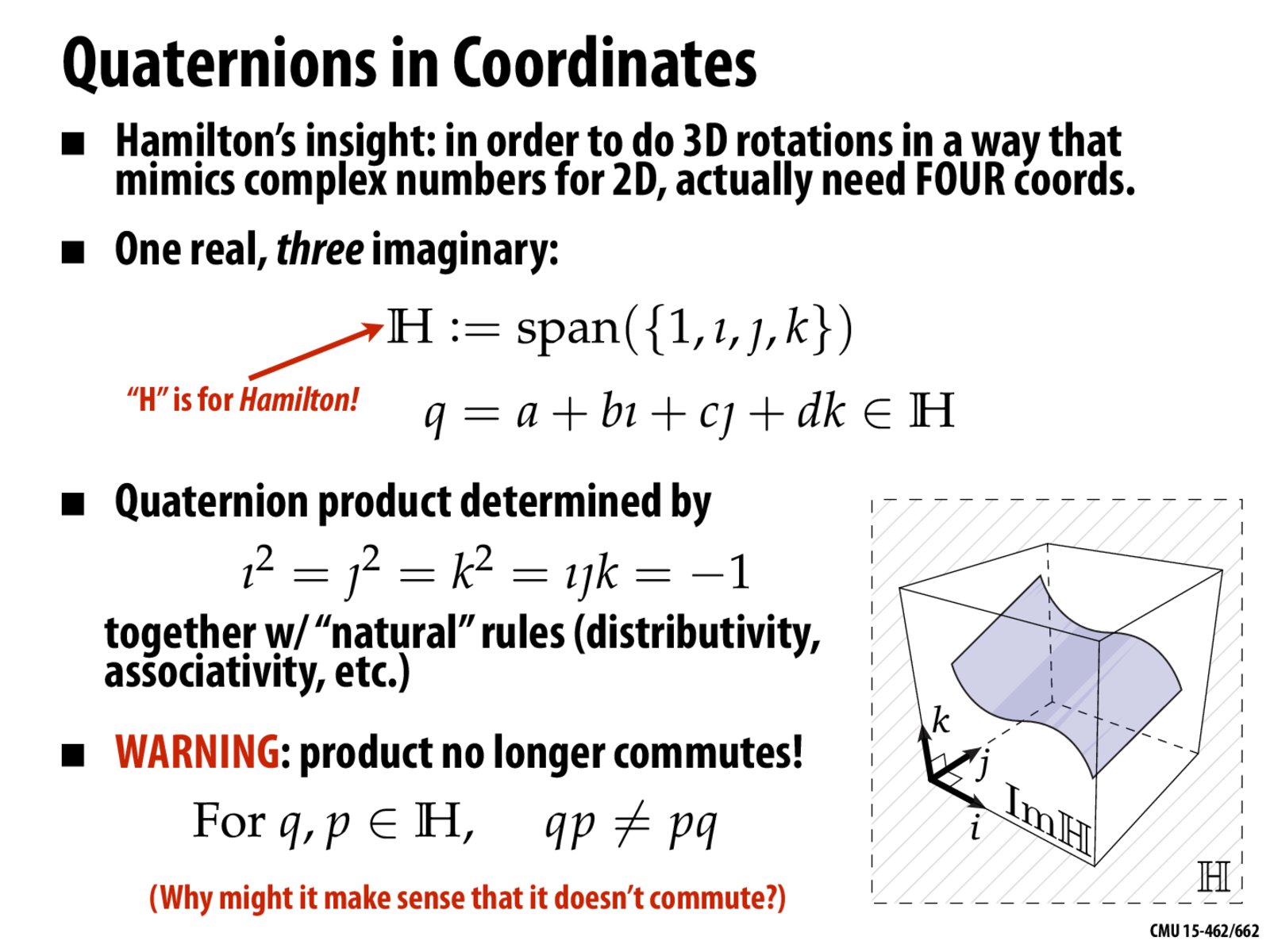
Another example of non-communitivity is that ij = k but ji = -k.
fzeng
Could you give graphical examples of the quaternions and how it affects rotation? It is difficult for instance to imagine what a rotation of ij means.
tianez
In 2d, we have 1 and i as the two bases. But in 3d, if I understand correctly that i, j, k are the three bases, what does 1 do?
daria
Is there any geometrical/physical reason why we need 4 basis vectors, or does the math just work out that way?
WhaleVomit
Extending on tianez's question. If quaternions represent rotations, and rotations have 3 degrees of freedom, wouldn't this force there to be rotations that can be represented by infinitely many different quaternions? i.e. the mapping from quaternions to rotations is not injective.
Benjamin
Is there a polar form for quaternions like there is for complex numbers?
ScreenTime
What is the intuition behind the k component ?
abigalekim
I'm trying to understand quaternions and think that the i, j, and k components can represent 3D dimensions on a plane. Is this correct? If so, what does the 1 represent? The imaginary component?
shoes
What exactly are we calculating with quaternions? What's the intuition behind the 1 and why are 4 coordinates necessary?
air54321
How does ijk = -1? I think I’m just generally confused about the role of k as well.
rbm
Is there anyway to interpret this as a use of homogeneous coordinates?
jcm
how are these equalities important?
spidey
How exactly do quaternions affect rotations and does this apply only to 3 dimensional objects?
Mogician
Is there any rules or intuitive explanations on why we need 2 more complex units (j, k) to describe rotation in 3D than that in 2D space? What if we want to describe "rotation" in 4D space? Do we need 2 more units or 3 more?
In quaternions, what is the real number (a) affecting? My intuition is the i, j, k values are mapping relative 3d axis in a way (although I might be wrong), but I'm having trouble seeing where the real number affects the rotation.
Is there a similar concept for higher dimensions? Eg. if we wanted to rotate a hypothetical 4D object, are there 2^3 - 1 = 7 imaginary coordinates?
Trying to imagine i, j, and k as actions onto the plane, it seems like multiplying by any one of them will rotate about some specific axis, sort of like Euler angles. If so, how can one make sense of ijk = -1? Also, what would it mean to "rotate" by i + j?
Another example of non-communitivity is that ij = k but ji = -k.
Could you give graphical examples of the quaternions and how it affects rotation? It is difficult for instance to imagine what a rotation of ij means.
In 2d, we have 1 and i as the two bases. But in 3d, if I understand correctly that i, j, k are the three bases, what does 1 do?
Is there any geometrical/physical reason why we need 4 basis vectors, or does the math just work out that way?
Extending on tianez's question. If quaternions represent rotations, and rotations have 3 degrees of freedom, wouldn't this force there to be rotations that can be represented by infinitely many different quaternions? i.e. the mapping from quaternions to rotations is not injective.
Is there a polar form for quaternions like there is for complex numbers?
What is the intuition behind the k component ?
I'm trying to understand quaternions and think that the i, j, and k components can represent 3D dimensions on a plane. Is this correct? If so, what does the 1 represent? The imaginary component?
What exactly are we calculating with quaternions? What's the intuition behind the 1 and why are 4 coordinates necessary?
How does ijk = -1? I think I’m just generally confused about the role of k as well.
Is there anyway to interpret this as a use of homogeneous coordinates?
how are these equalities important?
How exactly do quaternions affect rotations and does this apply only to 3 dimensional objects?
Is there any rules or intuitive explanations on why we need 2 more complex units (j, k) to describe rotation in 3D than that in 2D space? What if we want to describe "rotation" in 4D space? Do we need 2 more units or 3 more?