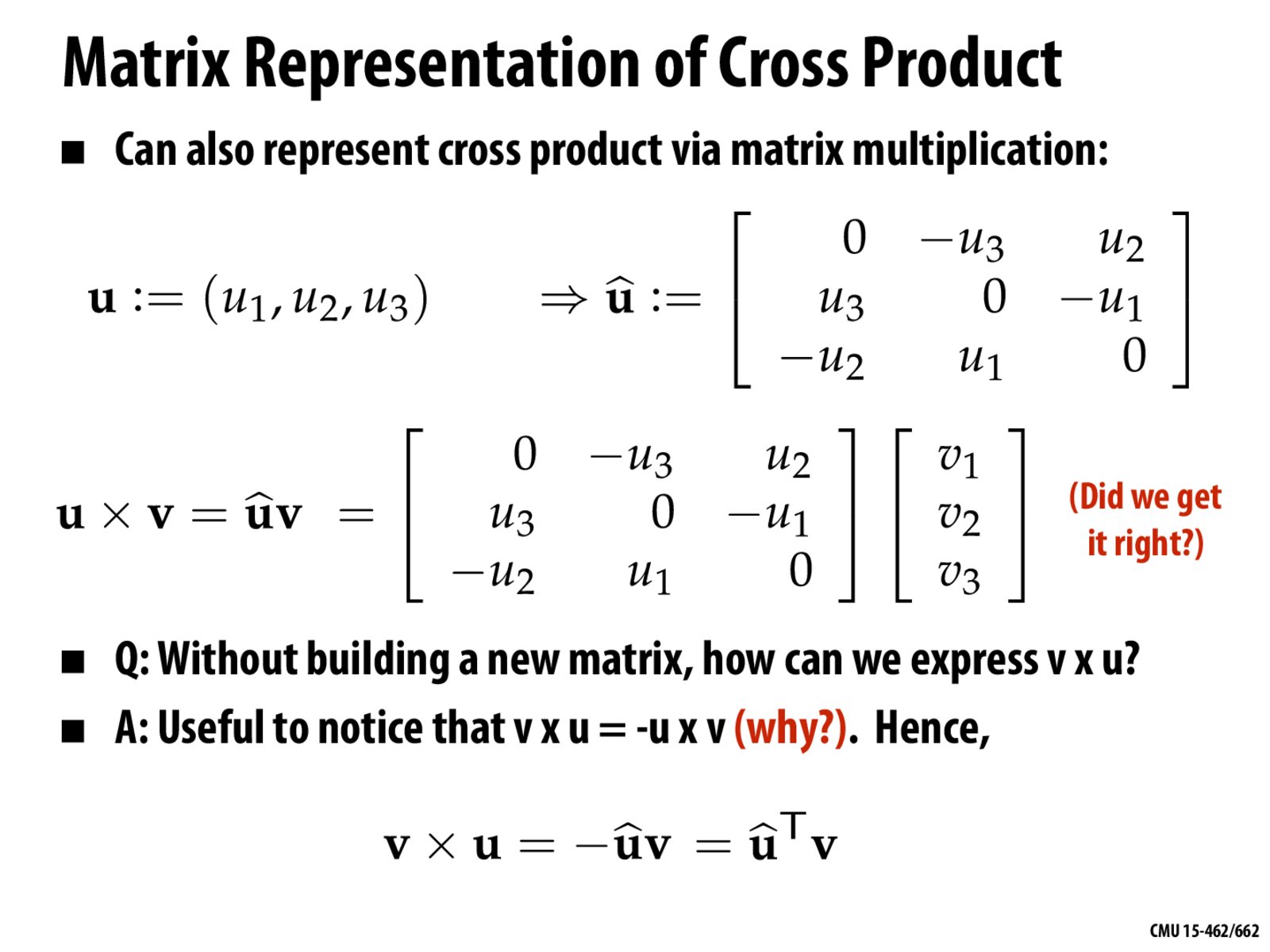
First time realizing that cross product matrix is a skew-symmetric matrix.
whc
Some Interesting Properties of Skew Symmetric Matrices From wikipedia:
Nonzero eigenvalues of a skew-symmetric matrix are non-real. (cannot stretch without rotation?)
If A is skew-symmetric, then I + A is invertible. (well geometrically this seems, dunno)
A^2 is symmetric and negative semi-definite. (the flipping about N)
whc
How to interpret a complex-valued eigenvector? I usually think of eigenvectors as components of a basis or something I can project onto. But what does it mean to project onto complex valued vectors?
hubbahubba
This matrix can be constructed from the formula on slide 7.
Gaming_Hippo
This notation is very useful in simplifying representation of combined and complex movements of rigid bodies. For example, say a point q is attached to a rotating body, which is at constant unit velocity around axis w, then the velocity of q can be represented as q'= w x q(t) = (w)^q(t).
graphic_content
The reason for it to be skew-symmetric is the same as the inner-product-matrix to be symmetric.
For the cross product:
uxv = -(vxu)
and for inner products:
<u,v> = <v,u>
Isaaz
According to the determinant definition of cross product, we have
det(u, v, uxv) >= 0 ...(0)
det(v, u, vxu) >= 0 ...(1)
det(u, v, uxv) = det(v, u, vxu) ...(2)
We already know that when we swap two lines in a matrix the determinant will flip the sign, so
det(v, u, vxu) = -det(u, v, vxu) ...(3)
Combine (2) and (3), we get
det(u, v, uxv) = -det(u, v, vxu) = det(u, v, -vxu)
So we finally get
uxv = -vxu
Arthas007
I believe this matrix is helpful in unifying all the transform rules (like rotation, extention, etc)
First time realizing that cross product matrix is a skew-symmetric matrix.
Some Interesting Properties of Skew Symmetric Matrices From wikipedia:
Nonzero eigenvalues of a skew-symmetric matrix are non-real. (cannot stretch without rotation?)
If A is skew-symmetric, then I + A is invertible. (well geometrically this seems, dunno)
A^2 is symmetric and negative semi-definite. (the flipping about N)
How to interpret a complex-valued eigenvector? I usually think of eigenvectors as components of a basis or something I can project onto. But what does it mean to project onto complex valued vectors?
This matrix can be constructed from the formula on slide 7.
This notation is very useful in simplifying representation of combined and complex movements of rigid bodies. For example, say a point q is attached to a rotating body, which is at constant unit velocity around axis w, then the velocity of q can be represented as q'= w x q(t) = (w)^q(t).
The reason for it to be skew-symmetric is the same as the inner-product-matrix to be symmetric. For the cross product: uxv = -(vxu) and for inner products: <u,v> = <v,u>
According to the determinant definition of cross product, we have det(u, v, uxv) >= 0 ...(0) det(v, u, vxu) >= 0 ...(1) det(u, v, uxv) = det(v, u, vxu) ...(2) We already know that when we swap two lines in a matrix the determinant will flip the sign, so det(v, u, vxu) = -det(u, v, vxu) ...(3) Combine (2) and (3), we get det(u, v, uxv) = -det(u, v, vxu) = det(u, v, -vxu) So we finally get uxv = -vxu
I believe this matrix is helpful in unifying all the transform rules (like rotation, extention, etc)