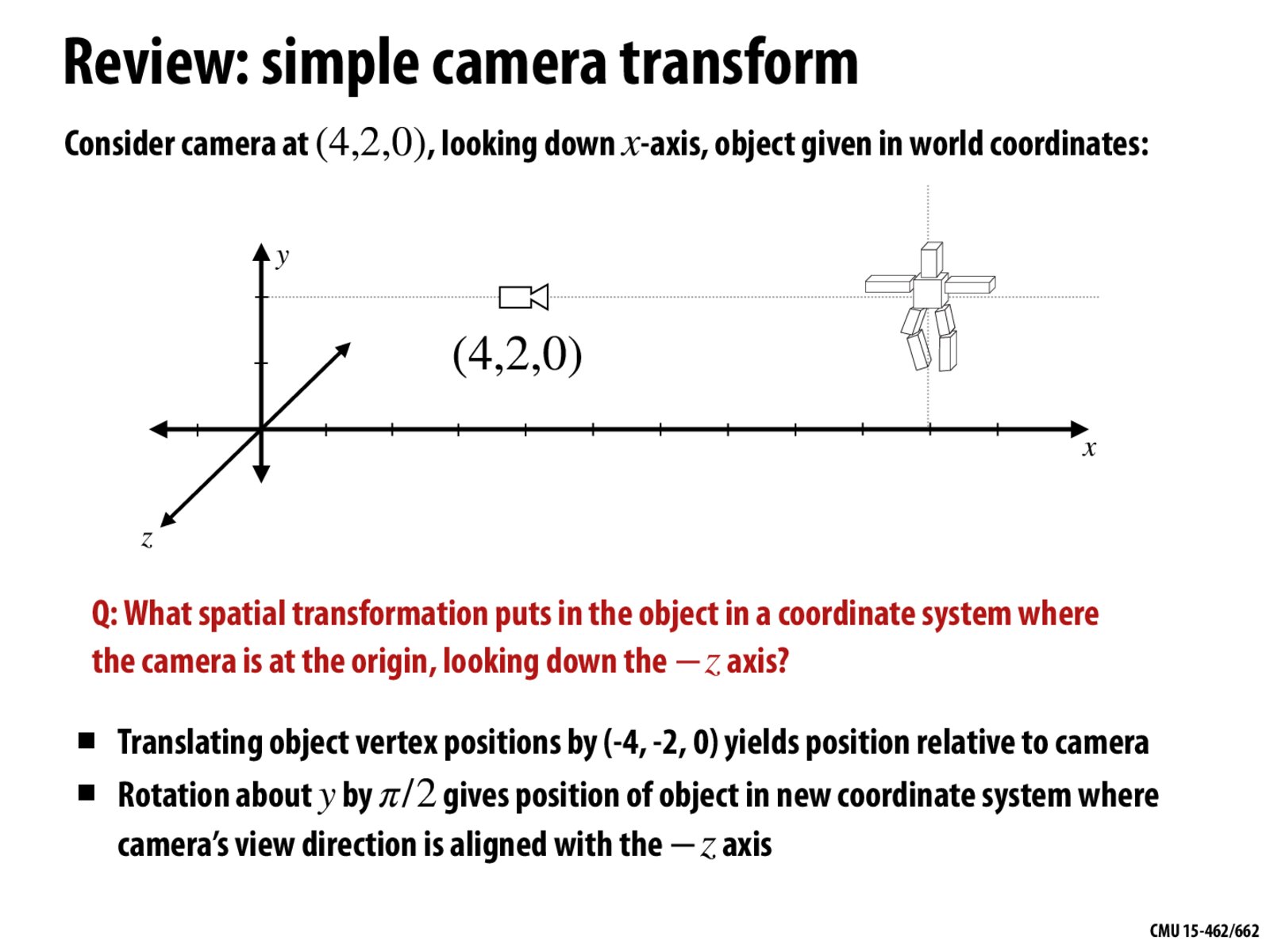
Not sure if I understand this correctly - the transformation on this slide(translate, and rotation it mentioned) will happen to both the camera and the objects? Then why objects need to take inverse transformations in the next slide?
keenan
@peanut The camera doesn't really exist. The only thing that really exists are the coordinates that describe objects. So, to simulate a camera you apply the inverse transformation to the objects. This transformation isn't actually getting applied to a "camera" anywhere (i.e., there is no other data stored in memory that represents the camera; just data representing the objects).
Not sure if I understand this correctly - the transformation on this slide(translate, and rotation it mentioned) will happen to both the camera and the objects? Then why objects need to take inverse transformations in the next slide?
@peanut The camera doesn't really exist. The only thing that really exists are the coordinates that describe objects. So, to simulate a camera you apply the inverse transformation to the objects. This transformation isn't actually getting applied to a "camera" anywhere (i.e., there is no other data stored in memory that represents the camera; just data representing the objects).