Under what situations would using a KD-tree be preferable to the BVH? I think I understand how they both work and the difference between their workings but I don't really get when one geometry would be preferred over the other.
idontknow
Is it common to use a mixture of BVH/KVH/Voxel/Octree partitioning all at the same time? I feel like it would make sense to section off different parts of a scene depending on whether they fit each partitioning scheme
dranzer
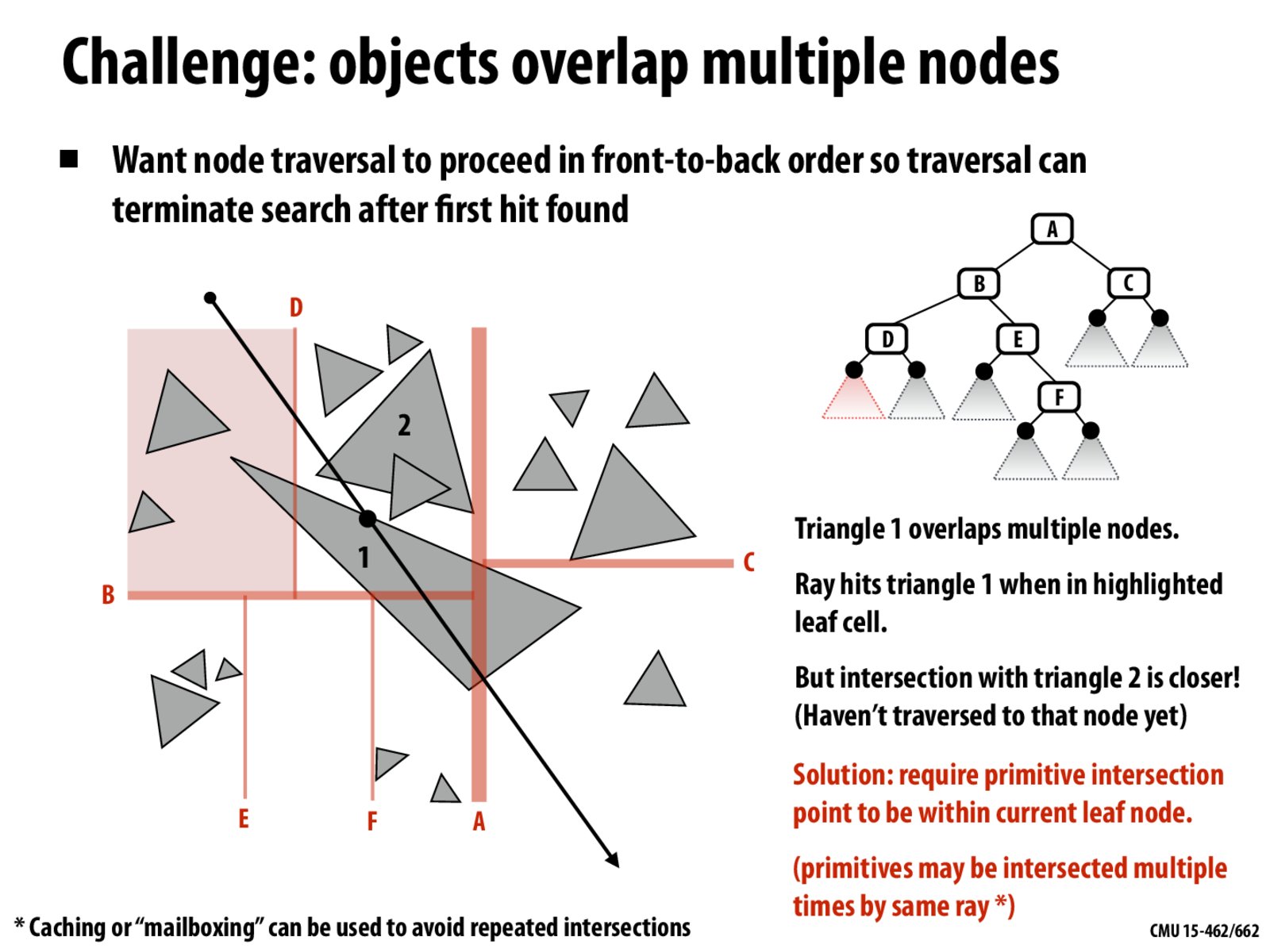
I also don't quite understand the benefit of using KD Tree over a BVH, for a primitive in multiple spaces, we can't halt execution. For a BVH we can't stop execution because there might be occupying the same space. In practice is that the case that primitives in multiple spaces is rarer than bounding boxes in overlapping space ?
Under what situations would using a KD-tree be preferable to the BVH? I think I understand how they both work and the difference between their workings but I don't really get when one geometry would be preferred over the other.
Is it common to use a mixture of BVH/KVH/Voxel/Octree partitioning all at the same time? I feel like it would make sense to section off different parts of a scene depending on whether they fit each partitioning scheme
I also don't quite understand the benefit of using KD Tree over a BVH, for a primitive in multiple spaces, we can't halt execution. For a BVH we can't stop execution because there might be occupying the same space. In practice is that the case that primitives in multiple spaces is rarer than bounding boxes in overlapping space ?