I still have trouble understanding where do the terms "elliptic, parabolic, hyperbolic" come from
keenan
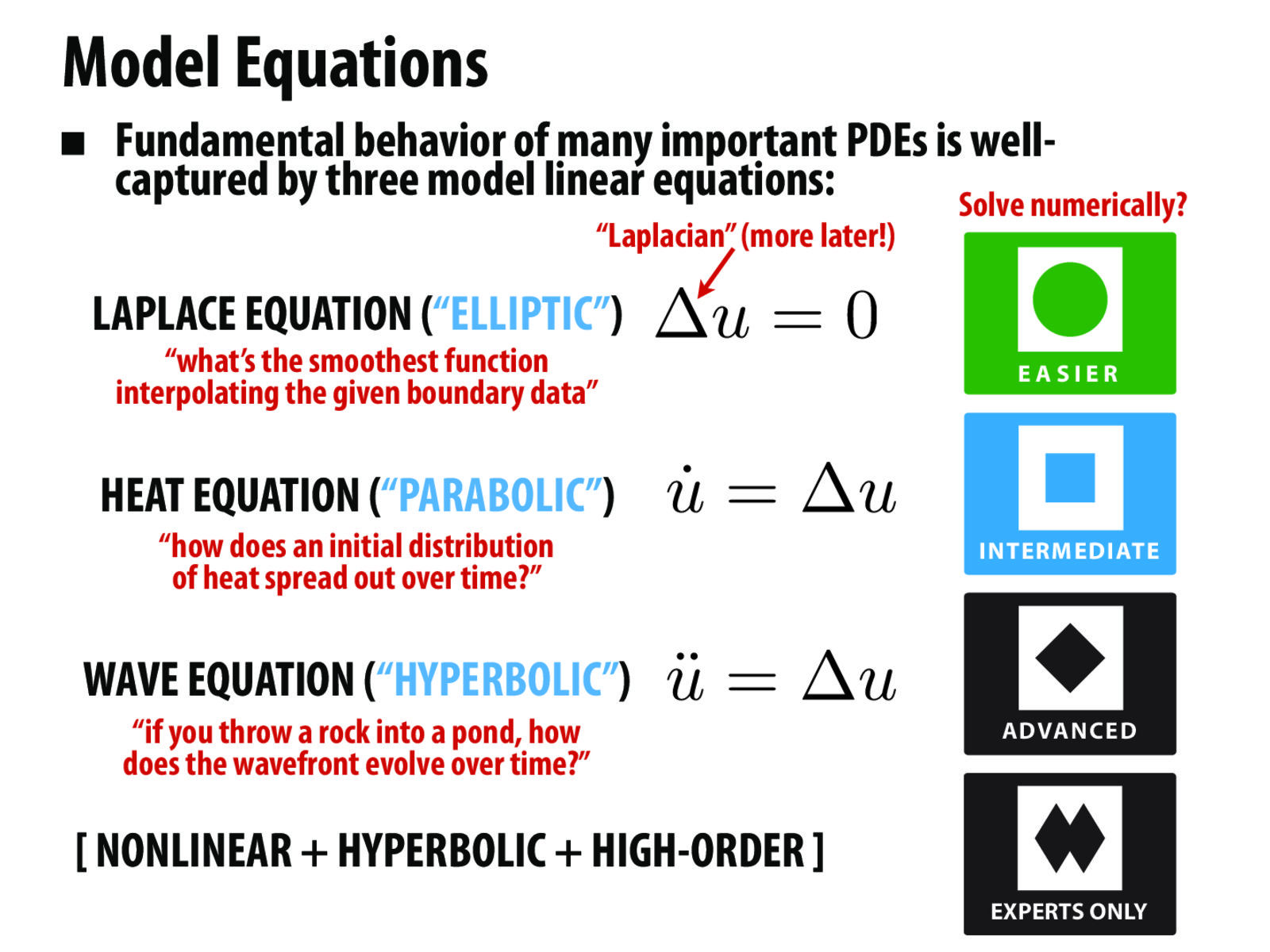
@Arthas007 Yeah, great question. The short answer is: it doesn't matter too much, and thinking about the model equations will give you better intuition about what these three classes of PDEs mean than what I'm about to tell you.
The longer answer is: every differential operator has a so-called "symbol," which is a polynomial corresponding to the different orders of derivatives appearing in the operator. Basically you replace each derivative of each order with a real variable. For instance, suppose you have a Laplace operator
If we let $\xi_0$ correspond to the 0th-order derivative (i.e., just the function itself), $\xi_1,\xi_2$ correspond to the 1st-derivative along $x$ and $y$ (resp.), and $\xi_{1,1},\xi_{1,2},\xi_{2,2}$ correspond to all the possible 2nd derivatives with respect to $x$ and $y$, then we get a polynomial
To understand the behavior of an operator, you're most interested in the so-called principal symbol, which is just the polynomial involving the highest-order terms:
The graph of this function basically looks like a convex bowl, and that tells us something about the nature of our differential operator. Just like a positive-definite matrix, it sort of tells us that this operator will be nice to work with, because it sort of captures a convex energy (...very loosely speaking! In this case, the Laplacian is the Hessian of the so-called Dirichlet energy, which is convex).
More precisely:
If the principal symbol is nonzero for $\xi \ne 0$, then the operator is elliptic.
If the principal symbol is zero for some $\xi \ne 0$, but is not negative anywhere (i.e., if it's semidefinite) then the operator is parabolic.
If the principal symbols is indefinite (but nondegenerate) then the operator is hyperbolic.
Finally, it may not be clear where the "ellipse", "parabola", and "hyperbola" come from. These are three fundamental conic sections, whose equations have the same character as the three PDEs: an ellipse is given by a definite implicit equation, a parabola has an semidefinite equation, and a hyperbola has an indefinite equation. Beyond that, there's not too much relationship between these "shapes" and the PDEs... mostly just a naming convention.
I still have trouble understanding where do the terms "elliptic, parabolic, hyperbolic" come from
@Arthas007 Yeah, great question. The short answer is: it doesn't matter too much, and thinking about the model equations will give you better intuition about what these three classes of PDEs mean than what I'm about to tell you.
The longer answer is: every differential operator has a so-called "symbol," which is a polynomial corresponding to the different orders of derivatives appearing in the operator. Basically you replace each derivative of each order with a real variable. For instance, suppose you have a Laplace operator
$$ \Delta = \frac{\partial^2}{\partial x^2} + \frac{\partial^2}{\partial y^2} $$
If we let $\xi_0$ correspond to the 0th-order derivative (i.e., just the function itself), $\xi_1,\xi_2$ correspond to the 1st-derivative along $x$ and $y$ (resp.), and $\xi_{1,1},\xi_{1,2},\xi_{2,2}$ correspond to all the possible 2nd derivatives with respect to $x$ and $y$, then we get a polynomial
$ p(\xi_0,\xi_1,\xi_2,\xi_{1,1},\xi_{1,2},\xi_{2,2}) = \xi_{1,1}^2 + \xi_{2,2}^2$.
To understand the behavior of an operator, you're most interested in the so-called principal symbol, which is just the polynomial involving the highest-order terms:
$ p_{\text{principal}} = \xi_{1,1}^2 + \xi_{2,2}^2$.
The graph of this function basically looks like a convex bowl, and that tells us something about the nature of our differential operator. Just like a positive-definite matrix, it sort of tells us that this operator will be nice to work with, because it sort of captures a convex energy (...very loosely speaking! In this case, the Laplacian is the Hessian of the so-called Dirichlet energy, which is convex).
More precisely:
This classification very much matches our classification of matrices/objective functions arising in optimization.
Finally, it may not be clear where the "ellipse", "parabola", and "hyperbola" come from. These are three fundamental conic sections, whose equations have the same character as the three PDEs: an ellipse is given by a definite implicit equation, a parabola has an semidefinite equation, and a hyperbola has an indefinite equation. Beyond that, there's not too much relationship between these "shapes" and the PDEs... mostly just a naming convention.