omg this has answered so many of my questions about how games are able to simulate ragdoll physics :O
sponge
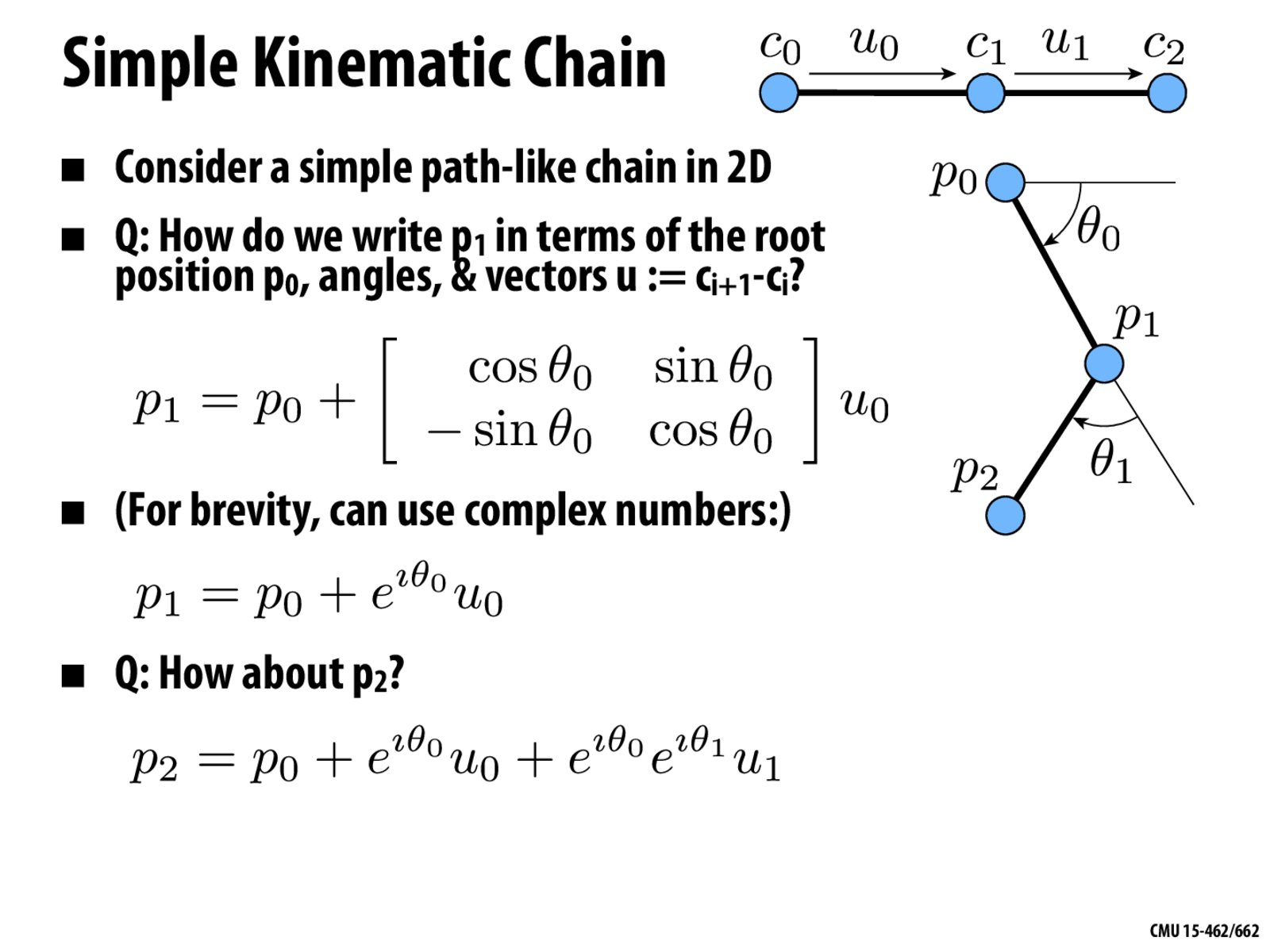
What's the difference between the c points and the p points?
barath
probably c is when the rotation is not considered and every joint angle is 0 ?
FeiFeiFei
Only after I saw the formula using the Euler angle form in this slide did I know for sure in what order I should apply those transformation matrices correctly in A4.0 Task 2.
Isaaz
I think in Scotty3D the c points correspond to the "bind" functions and p points correspond to the "pose" functions.
clam
I imagine most implementations of this sort of thing would use vectors instead of complex numbers, and as you mentioned before symbolic/automatic differentiation is way more accurate than numerical. However, those combined seems like it would run into a ton of issues with the square root in the norm, having a lot of variables interdependent and just equation blowup during symbolic/instability with automatic. What approaches to current animation/kinematics software use to do this in practice?
keenan
@sponge Yeah, @barath has it right: $c_i$ are the locations in the reference configuration, and $p_i$ are the corresponding locations in the current configuration. The reference configuration is needed to give meaning to the angles $\theta$.
keenan
@clam Using vectors vs. complex numbers doesn't really change how autodiff works (or accuracy, etc.). Also not sure where you're seeing a norm.
omg this has answered so many of my questions about how games are able to simulate ragdoll physics :O
What's the difference between the c points and the p points?
probably c is when the rotation is not considered and every joint angle is 0 ?
Only after I saw the formula using the Euler angle form in this slide did I know for sure in what order I should apply those transformation matrices correctly in A4.0 Task 2.
I think in Scotty3D the c points correspond to the "bind" functions and p points correspond to the "pose" functions.
I imagine most implementations of this sort of thing would use vectors instead of complex numbers, and as you mentioned before symbolic/automatic differentiation is way more accurate than numerical. However, those combined seems like it would run into a ton of issues with the square root in the norm, having a lot of variables interdependent and just equation blowup during symbolic/instability with automatic. What approaches to current animation/kinematics software use to do this in practice?
@sponge Yeah, @barath has it right: $c_i$ are the locations in the reference configuration, and $p_i$ are the corresponding locations in the current configuration. The reference configuration is needed to give meaning to the angles $\theta$.
@clam Using vectors vs. complex numbers doesn't really change how autodiff works (or accuracy, etc.). Also not sure where you're seeing a norm.