I'm a little confused about why we use the term "manifold" for meshes. These examples seem to show manifold polygon meshes resulting in non-manifold surfaces. For the cube example, the surface has a self-intersection so we can't zoom in at any point and get a 2d grid.
I get that the manifold assumption is useful because you can then use better data structures like halfedge, but I guess I don't understand how the manifold property of a mesh relates to the manifold property of a surface.
bepis
I am also confused. By the property of halfedge connectivity the mesh is manifold, but these shapes do not look manifold. I understand that halfedges are useful because all manifold shapes with manifold meshes can be represented with halfedges, but I guess we cannot say that all manifold meshes will lead to manifold shapes?
Azure
Would it be possible to approximate a 4-D Klein bottle using 4-D half-edges? Is the Klein bottle even manifold?
keenan
Great questions---this is a tricky concept to really get your head around. In the mesh setting, there are actually two distinct concepts:
manifold connectivity, and
manifold geometry.
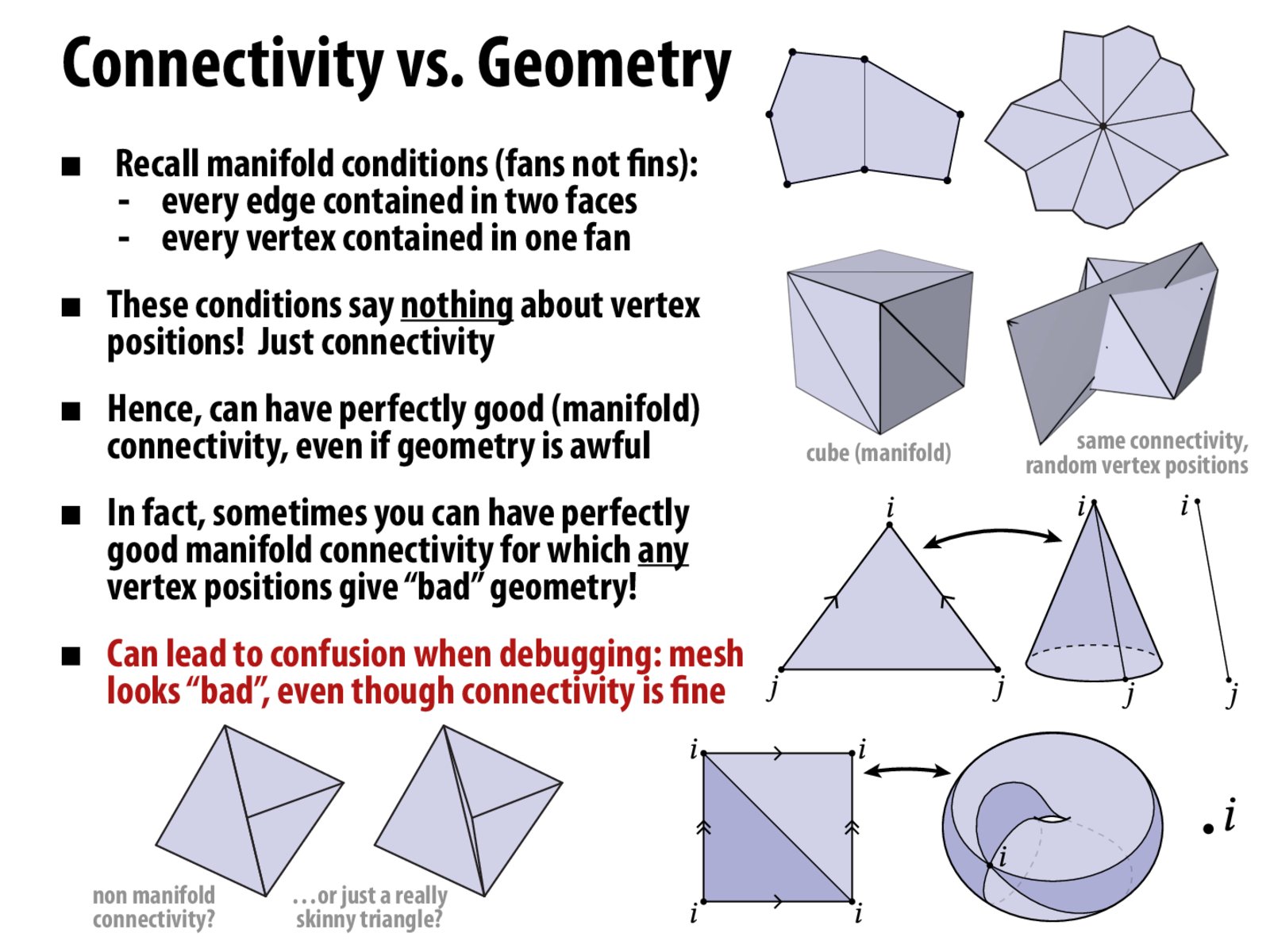
Manifold connectivity is the "fans but not fins" condition: every edge must be contained in two polygons (or one on the boundary); every vertex must be contained in a single loop of polygons (or a strip of polygons on the boundary). This condition only has to do with how mesh elements are connected up; the vertex positions are totally irrelevant.
Manifold geometry is the condition we discussed for the Earth: if you zoom in far enough, you can put a little grid on the surface.
A mesh can have manifold connectivity and nonmanifold geometry: just assign crazy vertex positions.
Actually, in the smooth setting there are directly analogous concepts. There is something called a https://en.wikipedia.org/wiki/Topological_manifold which is very much like having manifold connectivity. You don't know (or care) where the points are in space, but you do know that things are arranged in such a way that you could always, if you wanted to, write down a little grid of local coordinates around any point. If $M$ is a topological manifold, you can then assign it a geometry via a map $f: M \to \mathbb{R}^n$ which assigns coordinates to each point of $M$. The resulting set, $f(M)$ may or may not be a manifold subset of $\mathbb{R}^3$. For instance, you could map a topological sphere into space as a nice, round, unit sphere---or as a crazy mess with tons of self-intersections. The choice of map $f$ does not affect the fact that $M$ is a (topological) manifold, just like the choice of vertex positions for a mesh does not have any effect on the manifoldness of its connectivity.
keenan
@Azure The Klein bottle is manifold, but it's not orientable, meaning that it doesn't have two distinct sides. Halfedge meshes can't encode nonorientable surfaces since two neighboring polygons will always have the same orientation.
I'm a little confused about why we use the term "manifold" for meshes. These examples seem to show manifold polygon meshes resulting in non-manifold surfaces. For the cube example, the surface has a self-intersection so we can't zoom in at any point and get a 2d grid.
I get that the manifold assumption is useful because you can then use better data structures like halfedge, but I guess I don't understand how the manifold property of a mesh relates to the manifold property of a surface.
I am also confused. By the property of halfedge connectivity the mesh is manifold, but these shapes do not look manifold. I understand that halfedges are useful because all manifold shapes with manifold meshes can be represented with halfedges, but I guess we cannot say that all manifold meshes will lead to manifold shapes?
Would it be possible to approximate a 4-D Klein bottle using 4-D half-edges? Is the Klein bottle even manifold?
Great questions---this is a tricky concept to really get your head around. In the mesh setting, there are actually two distinct concepts:
Manifold connectivity is the "fans but not fins" condition: every edge must be contained in two polygons (or one on the boundary); every vertex must be contained in a single loop of polygons (or a strip of polygons on the boundary). This condition only has to do with how mesh elements are connected up; the vertex positions are totally irrelevant.
Manifold geometry is the condition we discussed for the Earth: if you zoom in far enough, you can put a little grid on the surface.
A mesh can have manifold connectivity and nonmanifold geometry: just assign crazy vertex positions.
Actually, in the smooth setting there are directly analogous concepts. There is something called a https://en.wikipedia.org/wiki/Topological_manifold which is very much like having manifold connectivity. You don't know (or care) where the points are in space, but you do know that things are arranged in such a way that you could always, if you wanted to, write down a little grid of local coordinates around any point. If $M$ is a topological manifold, you can then assign it a geometry via a map $f: M \to \mathbb{R}^n$ which assigns coordinates to each point of $M$. The resulting set, $f(M)$ may or may not be a manifold subset of $\mathbb{R}^3$. For instance, you could map a topological sphere into space as a nice, round, unit sphere---or as a crazy mess with tons of self-intersections. The choice of map $f$ does not affect the fact that $M$ is a (topological) manifold, just like the choice of vertex positions for a mesh does not have any effect on the manifoldness of its connectivity.
@Azure The Klein bottle is manifold, but it's not orientable, meaning that it doesn't have two distinct sides. Halfedge meshes can't encode nonorientable surfaces since two neighboring polygons will always have the same orientation.