I think this can be very important in other fields as well, such as motion/path planning, where you want to the path of your autonomous vehicle for example to move smoothly from one point to another (assuming it is planning its path as a bunch of piecewise curves, idk if that is actually practiced or not.)
sponge
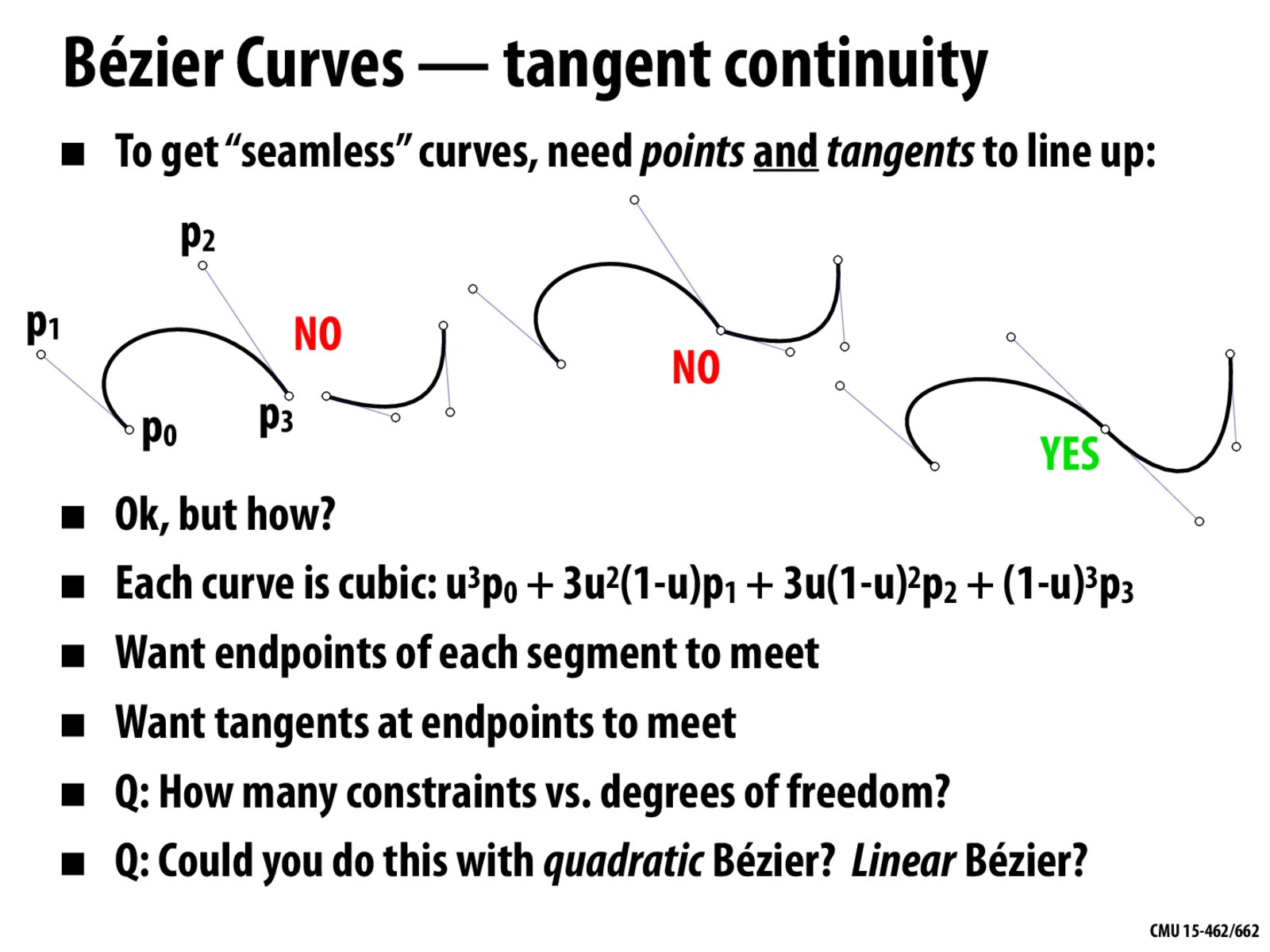
Could I get an explanation for the number of constraints vs degrees of freedom here? In lecture Keenan said 4 vector dof but he also said 8 vector dof (for closed loop) so I don't quite catch what a vector dof is here and how many there are.
keenan
@sponge For each segment of a cubic Bezier curve, you have 4 control points. So, 4 "vector degrees of freedom." Each control point has a number of scalar degrees of freedom equal to the dimension (one for each coordinate), so 2 for points in the plane. So, 8 scalar degrees of freedom for each planar segment.
I believe in the video I was talking about a loop made of two cubic Bezier segments, each of which has 4 vector degrees of freedom (for 8 total).
sponge
Ok and also to answer whether or not we could do this with quadratic Bezier curves, the answer would be yes right? Because you have more degrees of freedom than there are constraints?
keenan
@sponge Quadratic curves (degree 2) have fewer degrees of freedom than cubic curves (degree 3). That doesn't immediately mean you can't do it; you have to count. Can you do it?
I think this can be very important in other fields as well, such as motion/path planning, where you want to the path of your autonomous vehicle for example to move smoothly from one point to another (assuming it is planning its path as a bunch of piecewise curves, idk if that is actually practiced or not.)
Could I get an explanation for the number of constraints vs degrees of freedom here? In lecture Keenan said 4 vector dof but he also said 8 vector dof (for closed loop) so I don't quite catch what a vector dof is here and how many there are.
@sponge For each segment of a cubic Bezier curve, you have 4 control points. So, 4 "vector degrees of freedom." Each control point has a number of scalar degrees of freedom equal to the dimension (one for each coordinate), so 2 for points in the plane. So, 8 scalar degrees of freedom for each planar segment.
I believe in the video I was talking about a loop made of two cubic Bezier segments, each of which has 4 vector degrees of freedom (for 8 total).
Ok and also to answer whether or not we could do this with quadratic Bezier curves, the answer would be yes right? Because you have more degrees of freedom than there are constraints?
@sponge Quadratic curves (degree 2) have fewer degrees of freedom than cubic curves (degree 3). That doesn't immediately mean you can't do it; you have to count. Can you do it?