When are point clouds used? Isn't there a massive storage overhead to this method?
jifengy
Like the comment above, this does seem to be the least efficient method out of all the ones we talked about in this lecture, doesn't it?
FeiFeiFei
I think it might be an idea of using more space to trade less time. When we store each points, we can rander those point quickly, time-efficiently.
eryn
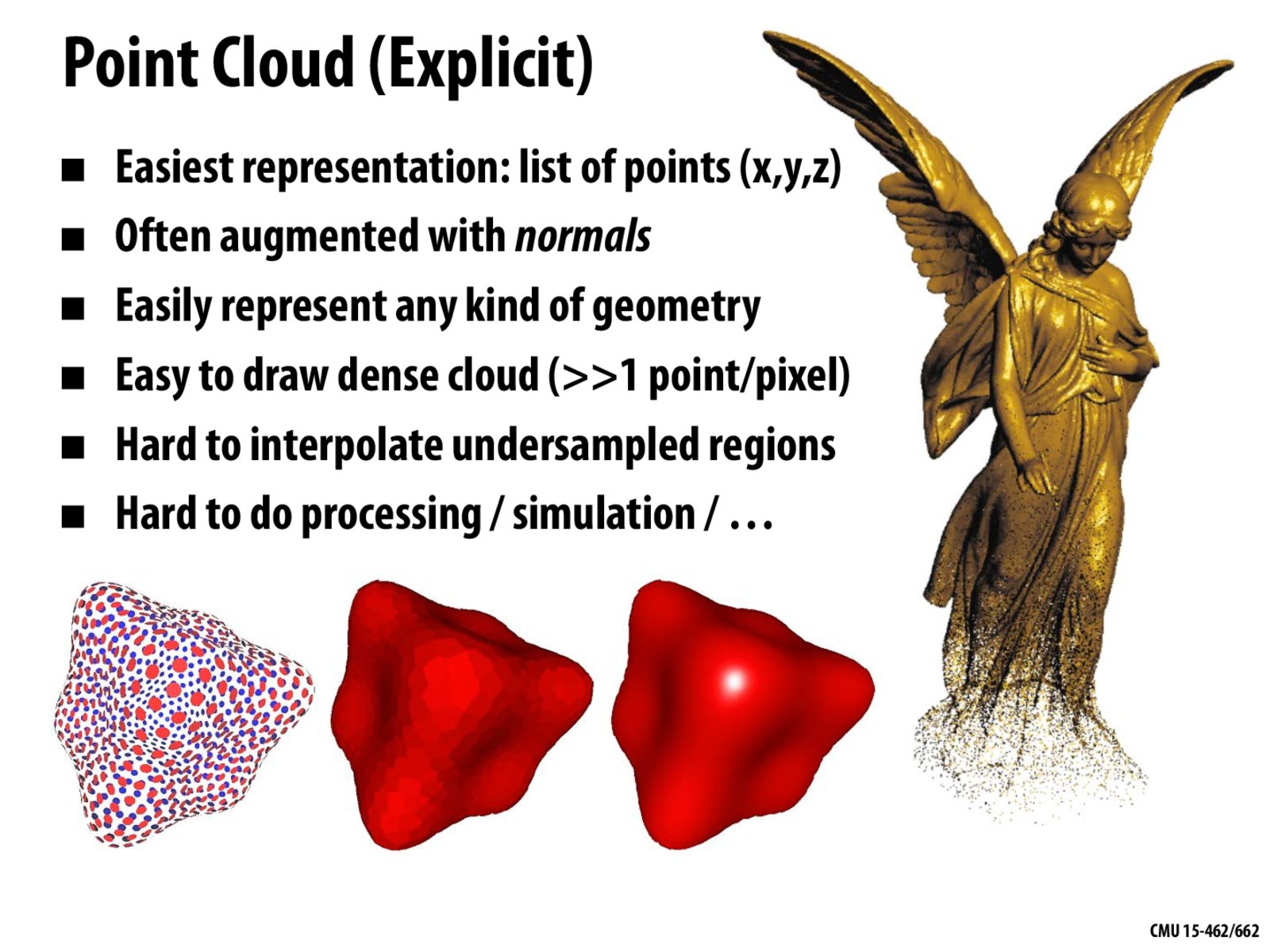
Imaging sensors usually use point cloud to represent what they "see" in the environment. The sensor would draw a point at each direction where the signal bounces back and color it according to the time taken to receive the reflected signal. Point clouds might not be easy to process but it's fast to draw in real-time.
keenan
All representations make sense in some context. As mentioned by @eryn, a point cloud is often a reasonable representation (or abstraction) of what is observed by measurement devices such as depth sensors, LiDAR scanners, etc., or the output of image-based reconstruction algorithms. This data can then be analyzed and processed in a variety of ways. They're also becoming a pretty popular representation for doing machine learning on geometric data, since they're completely regular: just a long list of points. But they do indeed have the mentioned shortcomings, such as the need to have a high density of sampling (especially for, say, large flat objects like walls or tables) and lack of neighborhood information.
When are point clouds used? Isn't there a massive storage overhead to this method?
Like the comment above, this does seem to be the least efficient method out of all the ones we talked about in this lecture, doesn't it?
I think it might be an idea of using more space to trade less time. When we store each points, we can rander those point quickly, time-efficiently.
Imaging sensors usually use point cloud to represent what they "see" in the environment. The sensor would draw a point at each direction where the signal bounces back and color it according to the time taken to receive the reflected signal. Point clouds might not be easy to process but it's fast to draw in real-time.
All representations make sense in some context. As mentioned by @eryn, a point cloud is often a reasonable representation (or abstraction) of what is observed by measurement devices such as depth sensors, LiDAR scanners, etc., or the output of image-based reconstruction algorithms. This data can then be analyzed and processed in a variety of ways. They're also becoming a pretty popular representation for doing machine learning on geometric data, since they're completely regular: just a long list of points. But they do indeed have the mentioned shortcomings, such as the need to have a high density of sampling (especially for, say, large flat objects like walls or tables) and lack of neighborhood information.