Still unclear about what does the three degrees of freedom mean
peanut
It means three variables to me.
L100magikarp
I think of it as the number of independent variables needed to uniquely define a state. For example, on a robot arm, we usually count the number of degrees of freedom as the number of independent motors that you can control.
The best way to see why 3D rotations have 3 DoFs is using Euler Angles. Imagine you have a motors that control3 how much you turn along the x-, y-, and z-axis, so you need exactly 3 motors to specify a particular rotation. The other representations also have 3-DoF: Axis-angle is represented with a unit vector used as the axis and a scalar corresponding to the amount of rotation, so you need 2 numbers to uniquely define a unit vector in 3D, and 1 number to define the rotation, so 3 numbers total. Similarly, unit quaternions can be uniquely specified with 3 out of the 4 entries.
Isaaz
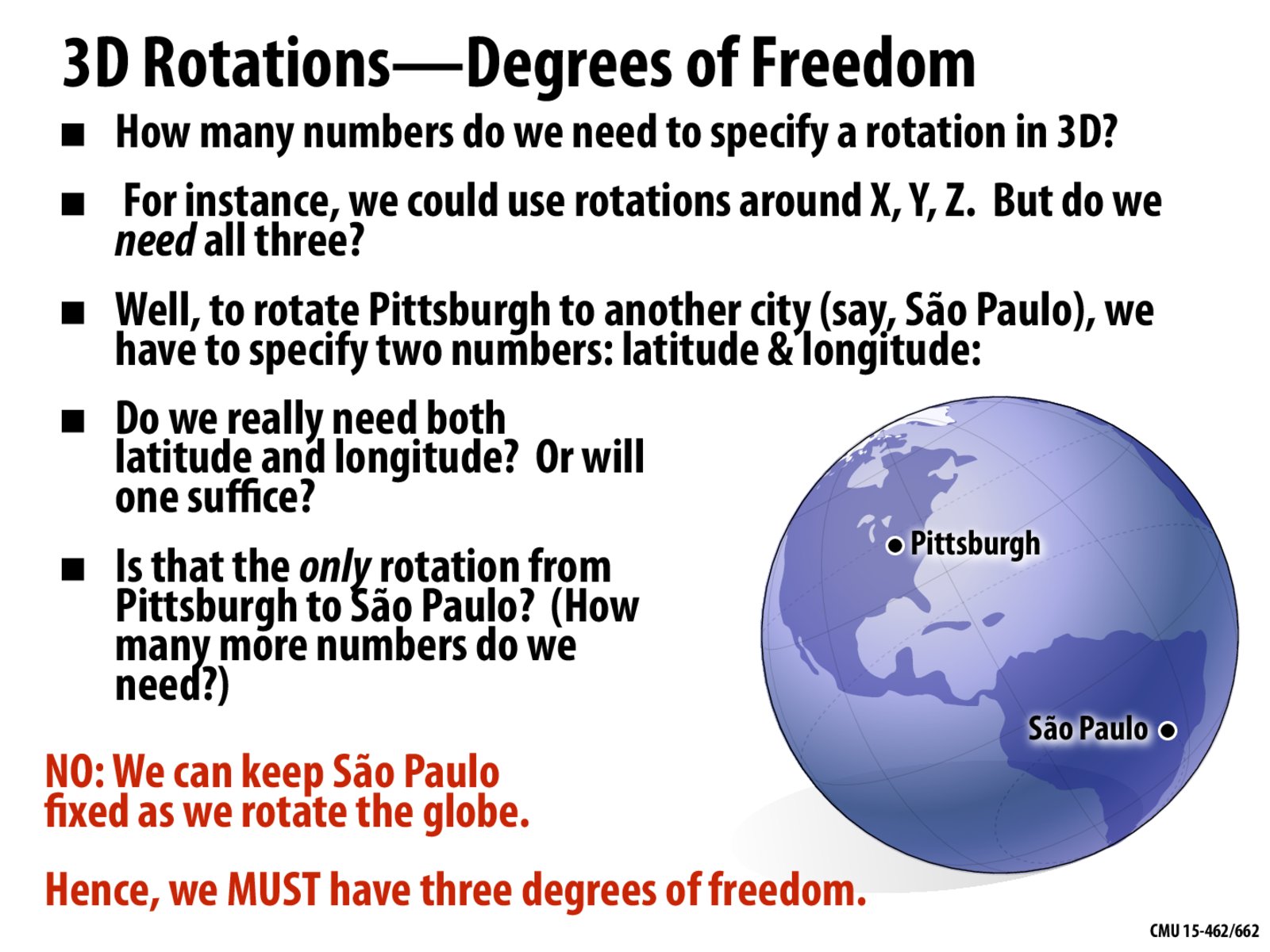
I don't quite understand the example. Why the fact that we can keep Sao Paulo fixed leads to the conclusion that we need three DoF?
L100magikarp
The globe can still rotate arbitrary about the axis formed by connecting Sao Paolo to the center of the sphere. Thus, 2 numbers were insufficient to uniquely define the rotation
keenan
Right. Actually, I didn't show that three degrees of freedom were sufficient. Only that they were necessary: we have a 2-parameter family of rotations that takes Pittsburgh to some other city, and for each target city we have a 1-parameter family of rotations that keeps that city fixed.
Here's a more formal argument. Recall that a matrix $U \in \mathbb{R}^{3 \times 3}$ is called orthogonal if $U^T U = UU^T = I$. Equivalently, if
$$f(A) = A^T A - I, $$
then the orthogonal matrices are those for which $f(A) = 0$. Just like we can think of the unit circle as the subset of points in $\mathbb{R}^2$ such that $x^2 + y^2 - 1 = 0$, we can think of the set of all orthogonal matrices as a "shape" in nine-dimensional space (just imagine we stack the nine entries of $A$ into a single vector). What's the dimension of this shape? Well, if you write out the equation $f(A) = 0$ in components you'll see that you have nine scalar conditions but only six of them are distinct (since both $I$ and $A^T A$ are symmetric matrices). Roughly speaking, each condition "removes a dimension" from the set of orthogonal matrices (much like each independent equation in a linear system reduces the dimension of the solution space by 1). More precisely, suppose we think of $f$ as a map from the set $X$ of general $3 \times 3$ matrices into the set $Y$ of symmetric $3 \times 3$ matrices. Then by the preimage theorem we know (after checking that zero is a regular value) that the set of orthogonal matrices (given by the preimage $f^{-1}(0)$) has codimension 6, or equivalently, dimension 3.
Still unclear about what does the three degrees of freedom mean
It means three variables to me.
I think of it as the number of independent variables needed to uniquely define a state. For example, on a robot arm, we usually count the number of degrees of freedom as the number of independent motors that you can control.
The best way to see why 3D rotations have 3 DoFs is using Euler Angles. Imagine you have a motors that control3 how much you turn along the x-, y-, and z-axis, so you need exactly 3 motors to specify a particular rotation. The other representations also have 3-DoF: Axis-angle is represented with a unit vector used as the axis and a scalar corresponding to the amount of rotation, so you need 2 numbers to uniquely define a unit vector in 3D, and 1 number to define the rotation, so 3 numbers total. Similarly, unit quaternions can be uniquely specified with 3 out of the 4 entries.
I don't quite understand the example. Why the fact that we can keep Sao Paulo fixed leads to the conclusion that we need three DoF?
The globe can still rotate arbitrary about the axis formed by connecting Sao Paolo to the center of the sphere. Thus, 2 numbers were insufficient to uniquely define the rotation
Right. Actually, I didn't show that three degrees of freedom were sufficient. Only that they were necessary: we have a 2-parameter family of rotations that takes Pittsburgh to some other city, and for each target city we have a 1-parameter family of rotations that keeps that city fixed.
Here's a more formal argument. Recall that a matrix $U \in \mathbb{R}^{3 \times 3}$ is called orthogonal if $U^T U = UU^T = I$. Equivalently, if
$$f(A) = A^T A - I, $$
then the orthogonal matrices are those for which $f(A) = 0$. Just like we can think of the unit circle as the subset of points in $\mathbb{R}^2$ such that $x^2 + y^2 - 1 = 0$, we can think of the set of all orthogonal matrices as a "shape" in nine-dimensional space (just imagine we stack the nine entries of $A$ into a single vector). What's the dimension of this shape? Well, if you write out the equation $f(A) = 0$ in components you'll see that you have nine scalar conditions but only six of them are distinct (since both $I$ and $A^T A$ are symmetric matrices). Roughly speaking, each condition "removes a dimension" from the set of orthogonal matrices (much like each independent equation in a linear system reduces the dimension of the solution space by 1). More precisely, suppose we think of $f$ as a map from the set $X$ of general $3 \times 3$ matrices into the set $Y$ of symmetric $3 \times 3$ matrices. Then by the preimage theorem we know (after checking that zero is a regular value) that the set of orthogonal matrices (given by the preimage $f^{-1}(0)$) has codimension 6, or equivalently, dimension 3.