An explanation of better ways to store 1/z with finite precision: https://developer.nvidia.com/content/depth-precision-visualized
And a visualization of error: https://mynameismjp.wordpress.com/2010/03/22/attack-of-the-depth-buffer/
jfondrie
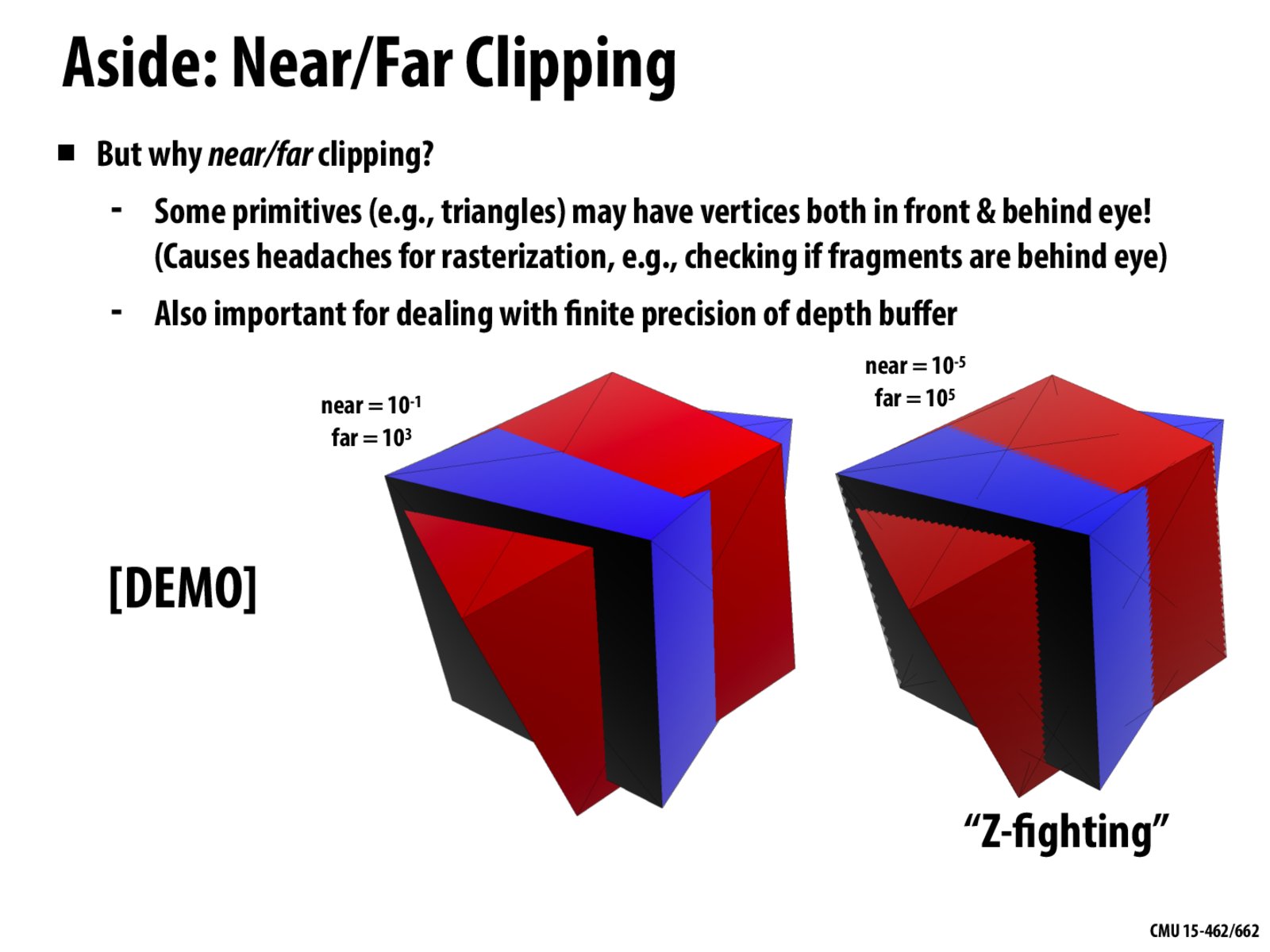
Not sure I understand the graphic here and how it relates to the 'front and behind eye' point on the slide - is the blue cube intended to be our unit cube that we mapped the view frustum to?
motoole2
Both of these two cubes are 3D objects floating in space, and demonstrates the z-fighting artifact (namely points where the geometry intersect). The z-fighting occurs because our depth buffer does not have enough precision to accurately resolve which points of the cube are closest to the camera.
The comment regarding triangles having vertices both in front and behind the eye is an entirely separate point. This is referring to triangles where one vertex is in front of the camera (visible) and one vertex is directly behind the camera (not visible), which creates complications in the rasterization pipeline.
Parker
I think Jim said that he had something special to talk about regarding z-fighting in class and to remind him later. If he still remembers what that was, I'd be interested in hearing it.
jmccann
I think I was forward-referencing the slides about 1/z and depth precision that come later in this deck.
An explanation of better ways to store 1/z with finite precision: https://developer.nvidia.com/content/depth-precision-visualized
And a visualization of error: https://mynameismjp.wordpress.com/2010/03/22/attack-of-the-depth-buffer/
Not sure I understand the graphic here and how it relates to the 'front and behind eye' point on the slide - is the blue cube intended to be our unit cube that we mapped the view frustum to?
Both of these two cubes are 3D objects floating in space, and demonstrates the z-fighting artifact (namely points where the geometry intersect). The z-fighting occurs because our depth buffer does not have enough precision to accurately resolve which points of the cube are closest to the camera.
The comment regarding triangles having vertices both in front and behind the eye is an entirely separate point. This is referring to triangles where one vertex is in front of the camera (visible) and one vertex is directly behind the camera (not visible), which creates complications in the rasterization pipeline.
I think Jim said that he had something special to talk about regarding z-fighting in class and to remind him later. If he still remembers what that was, I'd be interested in hearing it.
I think I was forward-referencing the slides about 1/z and depth precision that come later in this deck.