Could you give an example when encoding vectors in a non-orthonormal basis would be helpful?
Febgreen
I don't quite understand the point "Euclidean norm is any notion of length preserved by rotations/translations/reflections of space.". Can someone elaborate on that?
motoole2
One example where a non-orthonormal basis could come in handy is to compute the space of 3D points contained within a triangle. Suppose you were to define the triangle where one of the vertices is at the origin 0, and form a basis with vectors pointing to the two remaining vertices. Then it becomes trivial to find points w contained within the boundaries of the triangle, by evaluating w = a*u + b*v for scalars a>0 and b>0 where a+b<1.
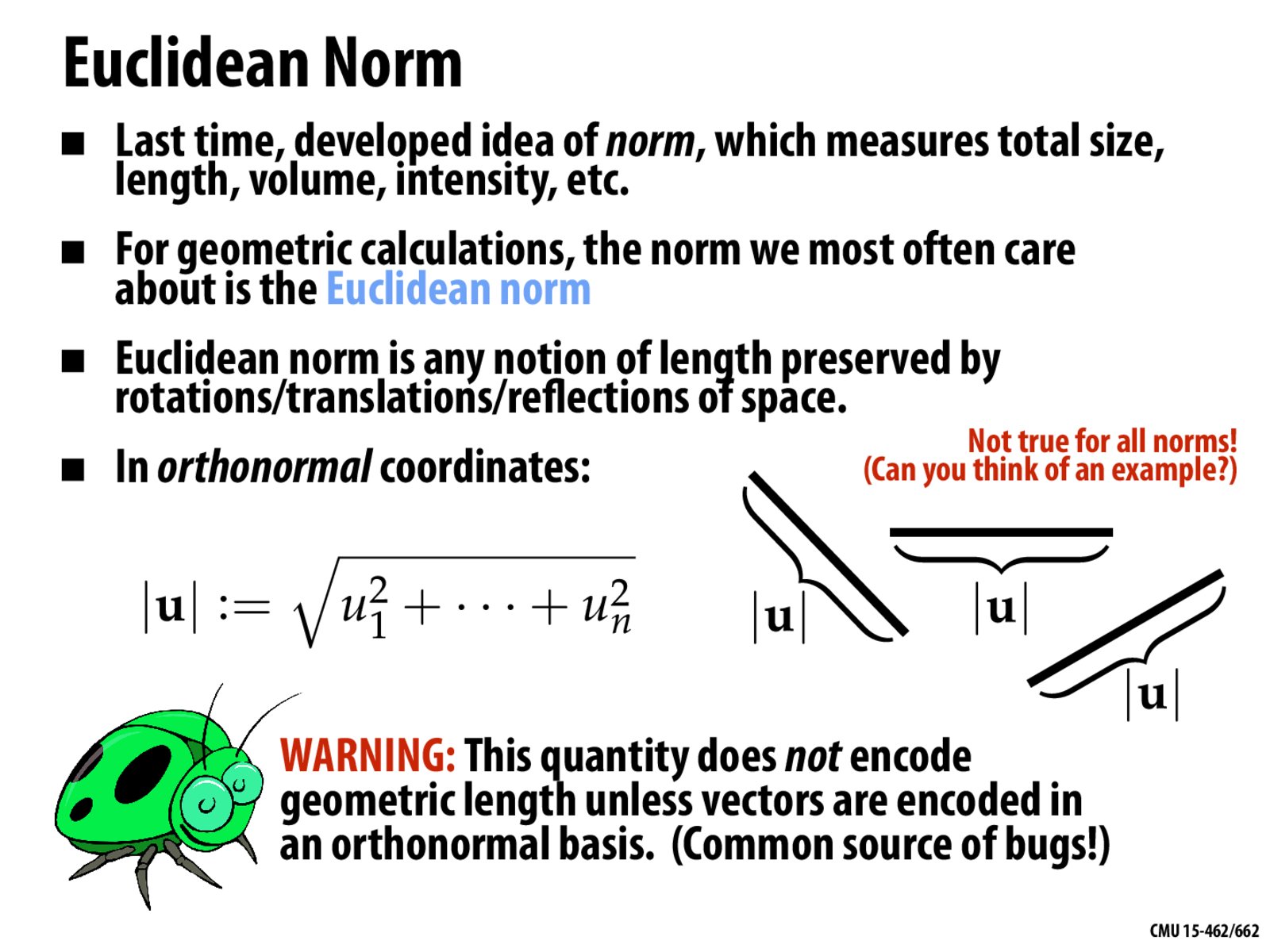
As for the statement on Euclidean norms, consider rotating/translating/flipping a line segment in different ways. The geometric length of the line does not change under these operations. So naturally, the norm that we value the most in graphics tends to be the Euclidean norm, which produces the same value regardless of how one rotates/translates/reflects this line segment.
As hinted in this slides, this is not true of all norms. For example, the L1 norm is equal to the sum of the absolute values of a vector's coordinates, i.e., |u_1|+|u_2|+...|u_n|. While flipping and translating will not affect the length of a line with respect to the L1 norm, rotation does! So this norm is less useful in the context of geometry and lengths.
Could you give an example when encoding vectors in a non-orthonormal basis would be helpful?
I don't quite understand the point "Euclidean norm is any notion of length preserved by rotations/translations/reflections of space.". Can someone elaborate on that?
One example where a non-orthonormal basis could come in handy is to compute the space of 3D points contained within a triangle. Suppose you were to define the triangle where one of the vertices is at the origin
0, and form a basis with vectors pointing to the two remaining vertices. Then it becomes trivial to find pointswcontained within the boundaries of the triangle, by evaluatingw = a*u + b*vfor scalarsa>0andb>0wherea+b<1.As for the statement on Euclidean norms, consider rotating/translating/flipping a line segment in different ways. The geometric length of the line does not change under these operations. So naturally, the norm that we value the most in graphics tends to be the Euclidean norm, which produces the same value regardless of how one rotates/translates/reflects this line segment.
As hinted in this slides, this is not true of all norms. For example, the L1 norm is equal to the sum of the absolute values of a vector's coordinates, i.e.,
|u_1|+|u_2|+...|u_n|. While flipping and translating will not affect the length of a line with respect to the L1 norm, rotation does! So this norm is less useful in the context of geometry and lengths.