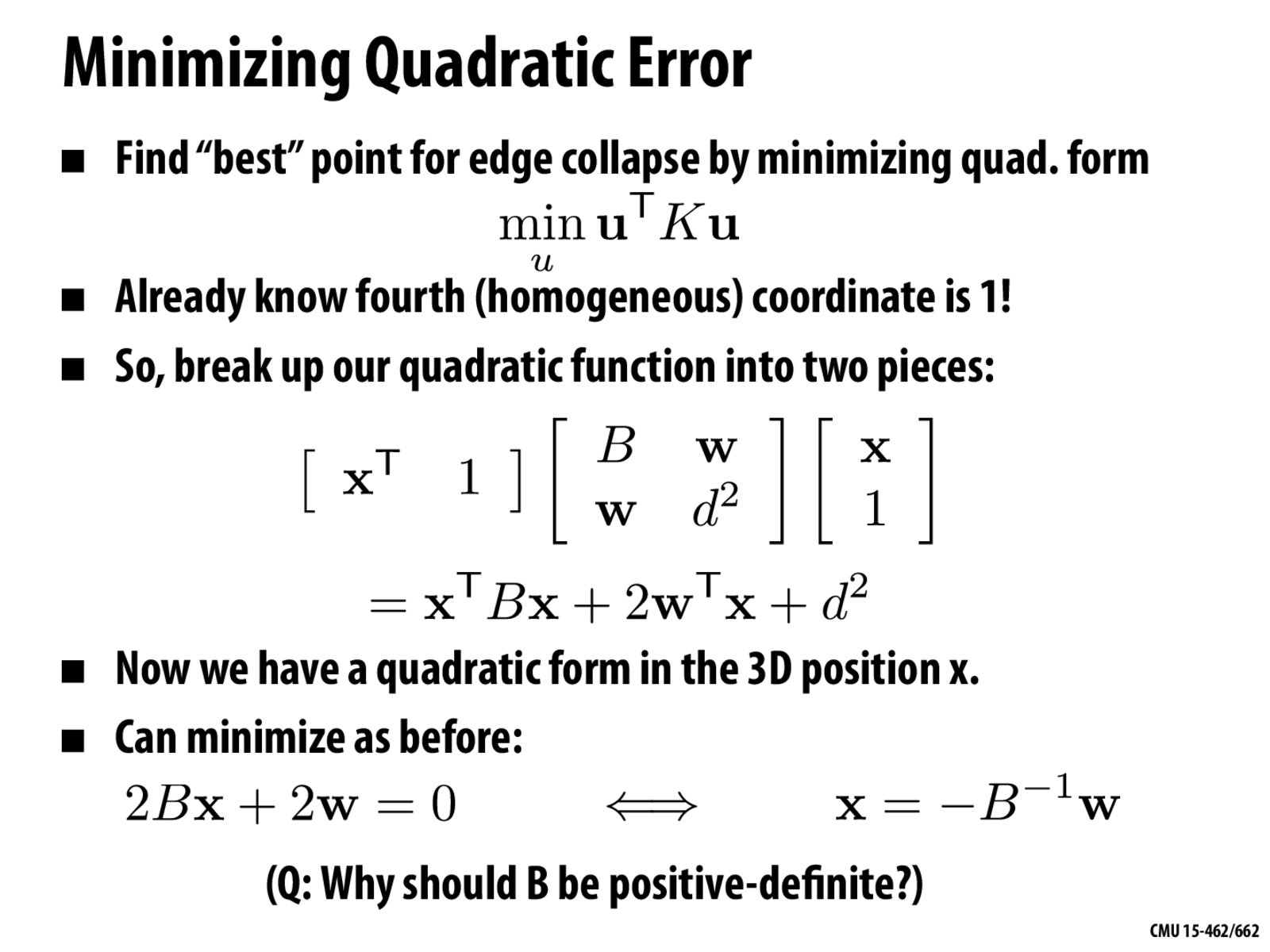
Q: Why should B be positive-definite?
A: Since the positive-definite matrix must have its inverse matrix?
motoole2
@Cats_Is_Always_Cute No, that's not entirely correct. Note that not all invertible matrices are positive-definite. A matrix that is strictly positive-definite has strictly positive eigenvalues (i.e., it is invertible), but an invertible matrix is not necessarily positive-definite.
What would happen if B is negative-definite for example (eigenvalues are strictly negative)? The solution to the expression x = -B^{-1} w does produce an answer, but it's not the correct answer with respect to the objective function at the top of this slide...
Ken
I don't understand why minimizing this would give us the best point for edge. And for collapseEdge in assignment 2 do we need to find the best point?
Ashley
Is the K[B w w d^2] the same K in the slide 30? So the answer of why B should be positive-definite is that B represents the distance to the plane, is it right?
motoole2
@Ken The collapseEdge function does not necessary need to give the "best" point; for example, computing the average of its two vertices should be fine. One might want to choose the vertex more carefully when one (or both) of the vertices are at the boundary of a mesh though.
That being said, you will need to find the "best" point when running a downsampling routine. This might involve (1) collapsing an edge and (2) moving it to the optimal point.
@Ashley @Ken The equation at the top of this page does originate from slide 30. In that slide, we have an expression, u^T K u, that computes the distance squared of a query point u = (x,y,z,1) from some plane represented by matrix K. Note that the matrix K in this case is semi-positive definite, resulting in many points u minimizing the distance to the plane.
On this slide, the matrix K is a sum of matrices K_i, each representing a plane i. This is useful, because we now have an expression for the sum of distances to a set of planes. Minimizing this expression produces a point closest to all the planes. If there are only three planes, then there exists one point u that makes u^T K u = 0; this point represents the intersection of the three planes. If there are more than three planes, then minimizing the quadratic error on this slide finds the point u that is by some definition "closest" to all planes.
The following slide also explains how to compute the matrix K used here in more detail.
Hope that clears it up, but let me know if this requires more clarification!
Q: Why should B be positive-definite? A: Since the positive-definite matrix must have its inverse matrix?
@Cats_Is_Always_Cute No, that's not entirely correct. Note that not all invertible matrices are positive-definite. A matrix that is strictly positive-definite has strictly positive eigenvalues (i.e., it is invertible), but an invertible matrix is not necessarily positive-definite.
What would happen if B is negative-definite for example (eigenvalues are strictly negative)? The solution to the expression
x = -B^{-1} wdoes produce an answer, but it's not the correct answer with respect to the objective function at the top of this slide...I don't understand why minimizing this would give us the best point for edge. And for collapseEdge in assignment 2 do we need to find the best point?
Is the K[B w w d^2] the same K in the slide 30? So the answer of why B should be positive-definite is that B represents the distance to the plane, is it right?
@Ken The collapseEdge function does not necessary need to give the "best" point; for example, computing the average of its two vertices should be fine. One might want to choose the vertex more carefully when one (or both) of the vertices are at the boundary of a mesh though.
That being said, you will need to find the "best" point when running a downsampling routine. This might involve (1) collapsing an edge and (2) moving it to the optimal point.
@Ashley @Ken The equation at the top of this page does originate from slide 30. In that slide, we have an expression,
u^T K u, that computes the distance squared of a query pointu = (x,y,z,1)from some plane represented by matrixK. Note that the matrixKin this case is semi-positive definite, resulting in many pointsuminimizing the distance to the plane.On this slide, the matrix
Kis a sum of matricesK_i, each representing a planei. This is useful, because we now have an expression for the sum of distances to a set of planes. Minimizing this expression produces a point closest to all the planes. If there are only three planes, then there exists one pointuthat makesu^T K u = 0; this point represents the intersection of the three planes. If there are more than three planes, then minimizing the quadratic error on this slide finds the pointuthat is by some definition "closest" to all planes.The following slide also explains how to compute the matrix
Kused here in more detail.Hope that clears it up, but let me know if this requires more clarification!