What does the real part of the quaternions represent? When taking the product of purely "not-real" quaternions we get a real part (in general). So how can the real coordinate be interpreted? According to the tool Adrian shared, it seems like increasing the 'w' coordinate tries to put the shape in its starting position, but I don't know how to interpret this.
jmccann
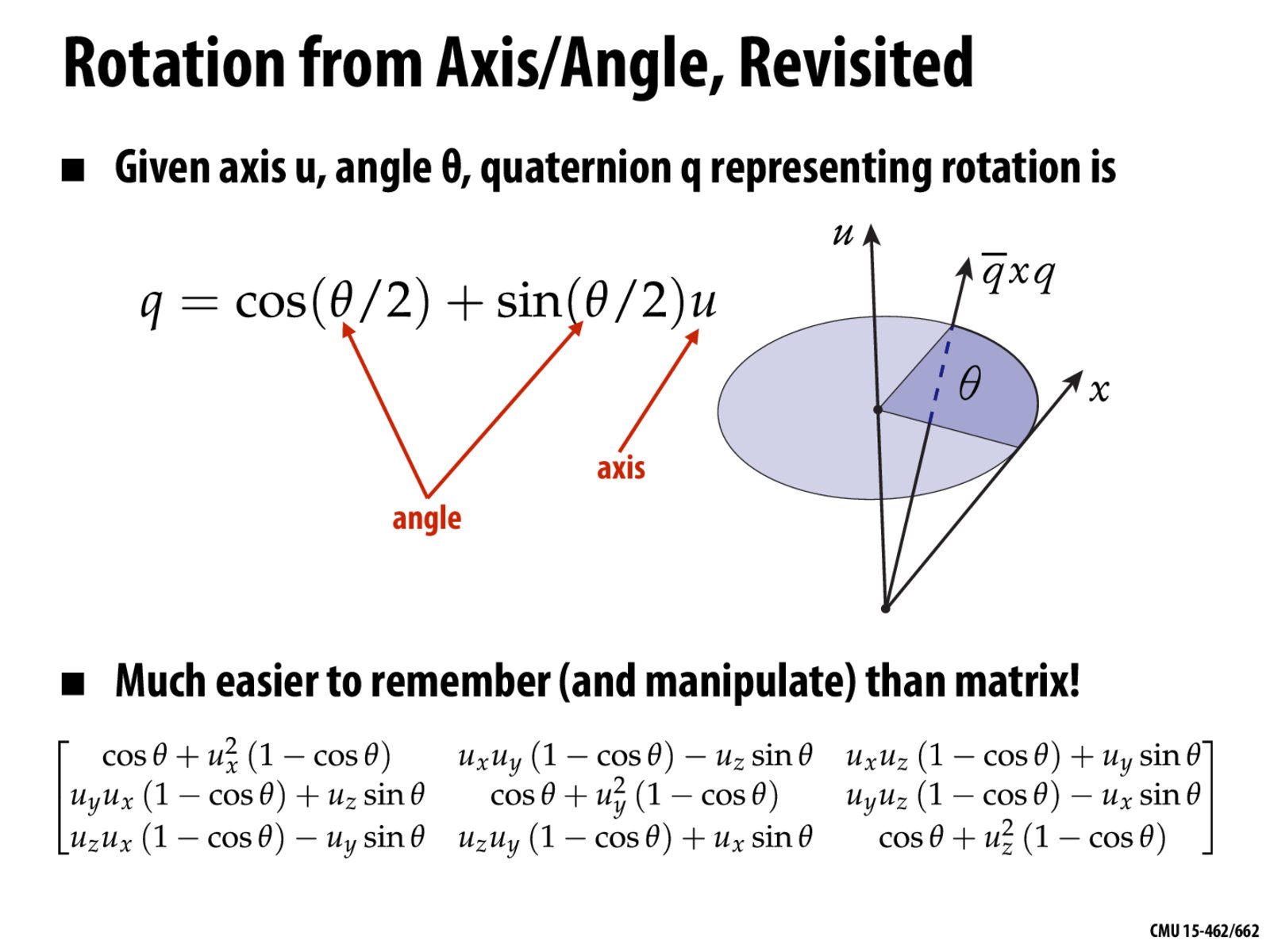
A rotation quaternion (unit-length quaternion) has components sin(theta/2)*u + cos(theta/2) -- so the real component is the cosine of half the rotation angle.
I believe Adrian's tool is normalizing the quaternion before using it to rotate, so increasing w is effectively increasing cos(theta/2) and decreasing sin(theta/2) -- basically, moving theta -> 0.
Ken
Some sources (Wikipedia among others) I found online say x' = q * x * conjugate of q
What does the real part of the quaternions represent? When taking the product of purely "not-real" quaternions we get a real part (in general). So how can the real coordinate be interpreted? According to the tool Adrian shared, it seems like increasing the 'w' coordinate tries to put the shape in its starting position, but I don't know how to interpret this.
A rotation quaternion (unit-length quaternion) has components sin(theta/2)*u + cos(theta/2) -- so the real component is the cosine of half the rotation angle. I believe Adrian's tool is normalizing the quaternion before using it to rotate, so increasing w is effectively increasing cos(theta/2) and decreasing sin(theta/2) -- basically, moving theta -> 0.
Some sources (Wikipedia among others) I found online say x' = q * x * conjugate of q