Good question - in class we just gave these formulas, but didn't really justify why they're true.
An abstract way of thinking about rotations is: a rotation is a map that is:
linear,
preserves the length of all vectors, and
preserves orientation (or "handedness").
If we can show that all of these properties hold for the map taking $x$ to $\bar{q} x q$, then this map must be a rotation. To show that it can encode all rotations, we also have to demonstrate that for a rotation by any angle around any axis, there exists a $q$ that produces this rotation.
Let's first consider the three properties above.
The first one, linearity, is easy: if you look back at the previous slide, you'll see that the quaternion product is linear in each of its arguments. In this case, then $xq$ is linear in $x$, and hence $\bar{q} x q$ is also linear in $x$ (even though it's quadratic in $q$).
For the second one, it might be useful to first show the following general fact: if $q$ and $p$ are any two quaternions, then $|qp| = |q||p|$, i.e., the norm of the product is the product of the norm. One way we can write the (squared) norm is $|q|^2 = \bar{q}q$ (can you show this is true, using one of the expressions for the quaternion product?). From there the rest is easy: $|qp|^2 = \overline{qp}qp = \bar{p}\bar{q}qp = \bar{p}|q|^2 p = |q|^2 \bar{p}p = |q|^2|p|^2)$, and hence (|qp| = |q||p|), as desired. Applying this argument one more time yields the desired statement about length preservation, namely $|\bar{q} x q| = |q|^2|x|$, but since (|q|=1) we get just $|x|$, i.e,. the length of $x$ was preserved.
Here it's enough to show that applying any unit $q$ to the standard basis $i,j,k$ for 3-vectors produces a basis that is still positively oriented. So, write out $\bar{q} i q$, $\bar{q} j q$, $\bar{q} k q$, and then check the determinant of the three resulting vectors.
The next slide resolves the final question: can we represent all rotations this way? Here the only thing to check is that the given expression for $q$ really does rotate about the desired axis by the desired angle. You might start out by considering an easy case, like rotating around the $i$ axis by an angle $\pi/2$, and generalizing from there.
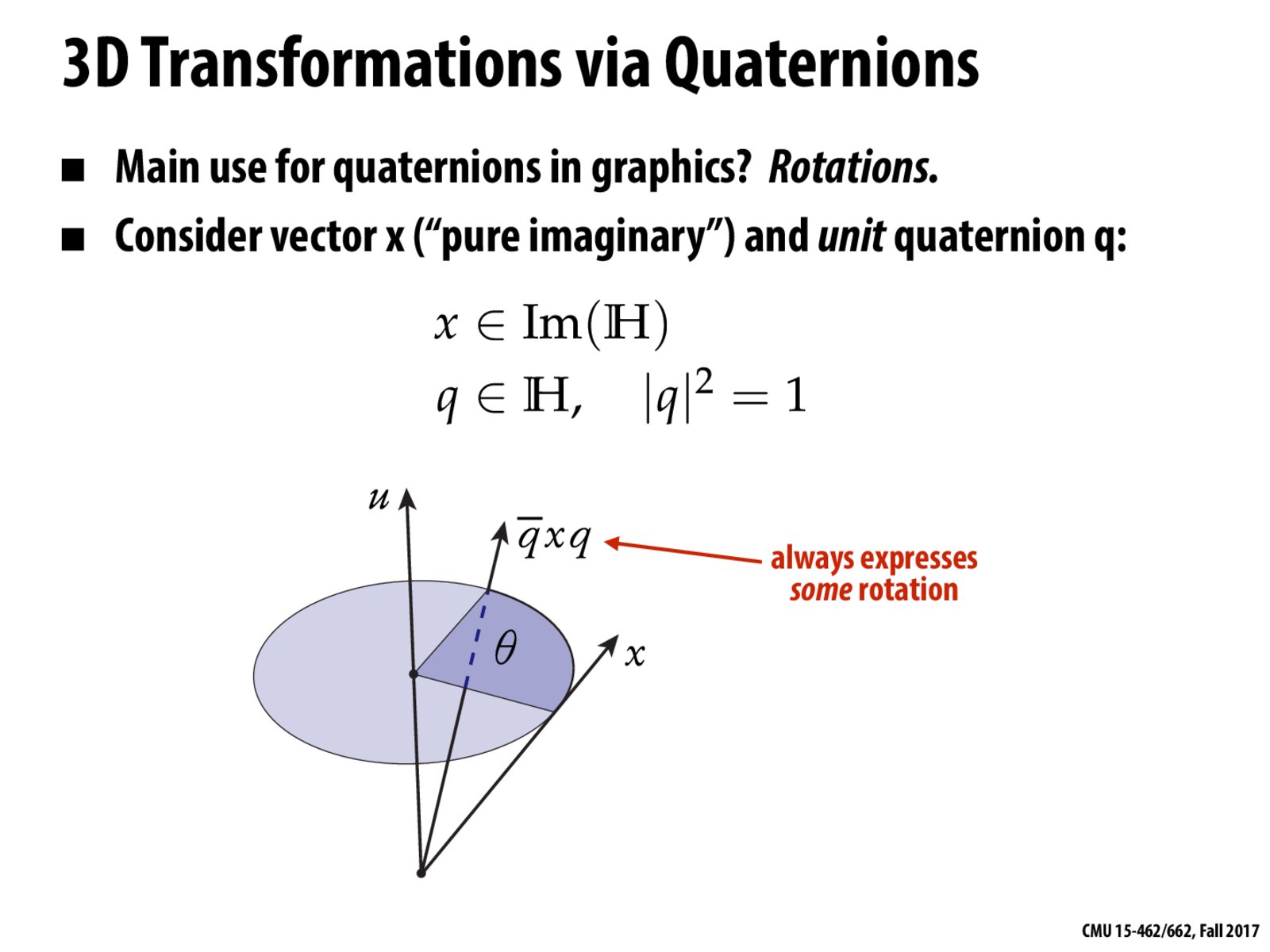
Why \bar{q}xq always expresses some rotation?
Good question - in class we just gave these formulas, but didn't really justify why they're true.
An abstract way of thinking about rotations is: a rotation is a map that is:
If we can show that all of these properties hold for the map taking $x$ to $\bar{q} x q$, then this map must be a rotation. To show that it can encode all rotations, we also have to demonstrate that for a rotation by any angle around any axis, there exists a $q$ that produces this rotation.
Let's first consider the three properties above.
The first one, linearity, is easy: if you look back at the previous slide, you'll see that the quaternion product is linear in each of its arguments. In this case, then $xq$ is linear in $x$, and hence $\bar{q} x q$ is also linear in $x$ (even though it's quadratic in $q$).
For the second one, it might be useful to first show the following general fact: if $q$ and $p$ are any two quaternions, then $|qp| = |q||p|$, i.e., the norm of the product is the product of the norm. One way we can write the (squared) norm is $|q|^2 = \bar{q}q$ (can you show this is true, using one of the expressions for the quaternion product?). From there the rest is easy: $|qp|^2 = \overline{qp}qp = \bar{p}\bar{q}qp = \bar{p}|q|^2 p = |q|^2 \bar{p}p = |q|^2|p|^2)$, and hence (|qp| = |q||p|), as desired. Applying this argument one more time yields the desired statement about length preservation, namely $|\bar{q} x q| = |q|^2|x|$, but since (|q|=1) we get just $|x|$, i.e,. the length of $x$ was preserved.
Here it's enough to show that applying any unit $q$ to the standard basis $i,j,k$ for 3-vectors produces a basis that is still positively oriented. So, write out $\bar{q} i q$, $\bar{q} j q$, $\bar{q} k q$, and then check the determinant of the three resulting vectors.
The next slide resolves the final question: can we represent all rotations this way? Here the only thing to check is that the given expression for $q$ really does rotate about the desired axis by the desired angle. You might start out by considering an easy case, like rotating around the $i$ axis by an angle $\pi/2$, and generalizing from there.