I am having difficulty understanding this follow-up question. Can someone help?
keenan
One thing you might try is:
-Build a matrix that represents the Euclidean inner product in the standard, orthonormal basis. (Hint: this should be easy!!)
-Build a matrix that represents the change of basis from the nonstandard basis to the standard basis.
-Compose the change of basis on both the left and the right (why?), making sure to transpose the correct one (which one? why?).
That should at least get you started. There's also an exercise in the newest homework that addresses some of these questions.
Haboric
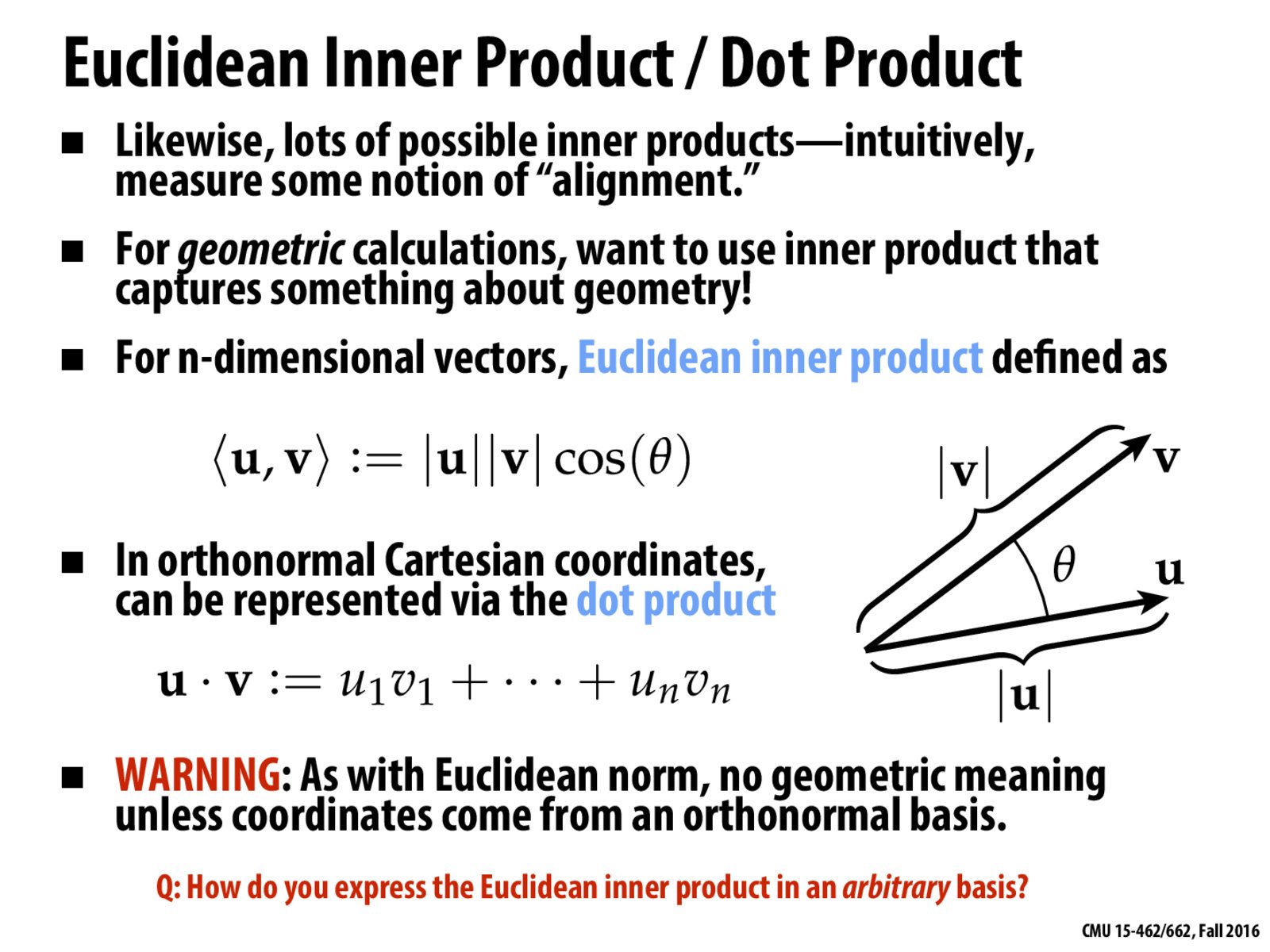
Following keenan's hints, we can build an identity matrix $\mathbf{I}$ to represent the Euclidean inner product in the standard, orthonormal basis:
$$\mathbf{x}\cdot \mathbf{y} = \mathbf{x}^T \mathbf{I} \mathbf{y}$$
Suppose we have a change of basis from the nonstandard basis to the standard basis $\mathbf{E}$ such that $\mathbf{E}\mathbf{u} = \mathbf{x}$, then plugging it into the above equation:
$$\mathbf{x}\cdot \mathbf{y} = (\mathbf{E} \mathbf{u})^T \mathbf{I} \mathbf{E} \mathbf{u} = \mathbf{u}^T \mathbf{E}^T \mathbf{I} \mathbf{E} \mathbf{u}$$
Correct me if anything is wrong.
keenan
Looks good to me. You can take this just one step further by removing the identity matrix in the middle, yielding
If (\mathbf{E}) is orthonormal (i.e., if we are just rotating or reflecting the coordinate system), then we have $\mathbf{E}^\mathsf{T} \mathbf{E} = \mathbf{E}^{-1} \mathbf{E} = \mathbf{I}$, i.e., the dot product still encodes the Euclidean inner product, since we are still in an orthonormal basis. Otherwise, the matrix $\mathbf{E}^\mathsf{T} \mathbf{E}$ is more interesting, and is necessary in order to encode the Euclidean inner product.
I am having difficulty understanding this follow-up question. Can someone help?
One thing you might try is:
-Build a matrix that represents the Euclidean inner product in the standard, orthonormal basis. (Hint: this should be easy!!)
-Build a matrix that represents the change of basis from the nonstandard basis to the standard basis.
-Compose the change of basis on both the left and the right (why?), making sure to transpose the correct one (which one? why?).
That should at least get you started. There's also an exercise in the newest homework that addresses some of these questions.
Following keenan's hints, we can build an identity matrix $\mathbf{I}$ to represent the Euclidean inner product in the standard, orthonormal basis: $$\mathbf{x}\cdot \mathbf{y} = \mathbf{x}^T \mathbf{I} \mathbf{y}$$ Suppose we have a change of basis from the nonstandard basis to the standard basis $\mathbf{E}$ such that $\mathbf{E}\mathbf{u} = \mathbf{x}$, then plugging it into the above equation: $$\mathbf{x}\cdot \mathbf{y} = (\mathbf{E} \mathbf{u})^T \mathbf{I} \mathbf{E} \mathbf{u} = \mathbf{u}^T \mathbf{E}^T \mathbf{I} \mathbf{E} \mathbf{u}$$ Correct me if anything is wrong.
Looks good to me. You can take this just one step further by removing the identity matrix in the middle, yielding
$$ \mathbf{x} \cdot \mathbf{y} = \mathbf{u}^\mathsf{T} \mathbf{E}^\mathsf{T} \mathbf{E} \mathbf{u}. $$
If (\mathbf{E}) is orthonormal (i.e., if we are just rotating or reflecting the coordinate system), then we have $\mathbf{E}^\mathsf{T} \mathbf{E} = \mathbf{E}^{-1} \mathbf{E} = \mathbf{I}$, i.e., the dot product still encodes the Euclidean inner product, since we are still in an orthonormal basis. Otherwise, the matrix $\mathbf{E}^\mathsf{T} \mathbf{E}$ is more interesting, and is necessary in order to encode the Euclidean inner product.